As I mentioned in an early posting about two months ago, if I didn’t have time to write enough, I’d cop out and post some photos of development models of some of our loudspeakers. It’s been a busy week. So, here are some photos of the BeoLab 18 and BeoLab 14.
Early BeoLab 18 prototype. This photo was taken on the floor of the Cube.
Early BeoLab 18 prototype – acoustic lens closeup. The lens itself is an SLA prototype and is attached to the top of the milled plastic cabinet using modelling putty.
Early BeoLab 18 prototype showing a closeup of the port. More modelling putty was added to the bottom of the port opening to smooth the curve as part of an investigation about reduction of turbulence noise.
The first BeoLab 14 prototype – subwoofer and satellite. Note that the DSP and amplifiers would be external for this prototype. The white modelling putty at the top of the pipe used to port the cabinet was put there to reduce turbulence noise. It is not a prototype of the final geometry of the port flare – it was just a quick-and-dirty solution for the initial demos.
“… the power output is phenomenal. Moreover, the detail is incredible and the tonal balance is spot on. The vocals in Antony & The Johnson’ Twilight are intense, the throb of Jeff Beck’s guitar in So Real resonates sublimely, whilst classical works yield profound levels of clarity. The mi-range is highly detailed, the treble is smooth and accurate, and the bass is rich and velvety. You can push the volume without risk: even at high levels the speakers have plenty in reserve.”
I realised this week that I’ve been throwing around words like ” voice coil”, “suspension”, “surround” and “spider” when I talk about loudspeakers, but many people don’t know what these things are – or how a loudspeaker driver works in general… So, this week, I thought I might back up a couple of steps and talk about some basics. There’s nothing here about Bang & Olufsen loudspeakers specifically – it’s just an introduction to how loudspeaker drivers (like woofers, for example) work.
Back in 1820, a Danish guy named Hans Christian Ørsted was in the middle of giving a lecture when he noticed that, when he switched a circuit on and off, a compass sitting nearby on the desk moved a little. Since he had been poking around with experiments in electricity and magnetism for years, it didn’t take him long to put two and two together and come up with the idea that, when you run electrical current through a wire, you get a magnetic field around it. (Interestingly, not only did Ørsted figure this out (unless you believe that Romagnosi did it), but he also wrote papers on aesthetics – and he was the first person to isolate the element aluminium – and he founded Den Polytekniske Læreanstalt which, today we call the Danish Technical University. So, he had a big influence on B&O in many respects.)
Nowadays, we know that, by putting current through a wire, you produce a magnetic field that has magnetic lines of force that encircle the wire. The direction of the lines of force are dependent on the direction of current, and the extent by which the magnetic lines of force extend away from the wire is dependent on the amount of current.
Depending on whether or not you believe Benjamin Franklin you can use your right or left hand to determine the direction of the lines of force. Figure 1, below, shows a right hand (which indicates that we believe Benjamin Franklin and we say that current runs from the positive terminal of a battery to the negative terminal, which is, in fact, incorrect.). The thumb points in the direction of the current and your other fingers wrap around the wire in the same direction as the magnetic lines of force (which go from North to South on a magnet).
Fig 1. The right hand rule shows the direction of the magnetic lines of force around a wire as a result of putting current through it.
If you take that same wire, keep running current through it, and coil it up like a spring, you can make a slightly more useful magnet that actually has a North pole and a South pole. Again, you can use your right hand to figure out which end is which – you wrap your fingers around the spring in the same direction of the current going through the wire, and your thumb will be pointing towards the North pole of the magnet, as is shown in Figure 2.
Fig 2. If you have a coil of wire and you put current in it, you get a magnetic field. Note that, if you run the current the other way (by reversing the battery), the magnetic poles will reverse, so North will be on the left of this diagram.
Now, if you take two magnets and you put them end-to-end with the North of one facing the North of the other (or South to South), they’ll push each other apart. If you put them North-to-South, they’ll pull each other together.
So, let’s do something weird. We’ll make a coil of wire, and we’ll put it in a strange-looking permanent magnet that is a bit like a horseshoe magnet that has been wrapped around itself to make a circular plug in the middle which is one pole (say, North) and a ring around it which is the other pole (say, South) as is shown in Figure 3.
Fig 3. A coil of wire about to be put in the gap of a strange-looking permanent magnet.
Now, if I put current through the wire, I’ll make a magnetic field around it that will either push against or pull towards the magnetic field of the permanent magnet around it. In other words, if it’s free to move, it will.
Now, since a loudspeaker, generally, is a thing that is used to convert electrical energy into acoustical energy; and, since in order to create acoustical energy (i.e. make noises) we need to move air molecules; we can use this strange device we’ve made in Figure 3 to our advantage. However, let’s be a little more methodical about this…
So, let’s build a dynamic moving coil loudspeaker driver, bit by bit. We’ll start by talking about its name. The “dynamic” part means that the basic principle that does the work is electromagnetism (as opposed to electrostatics or some esoteric methods like using plasma, tesla coils, or cats). The “moving coil” part is because, uh, the part of the device that moves in the magnetic field of the permanent magnet is a coil of wire.
What we want to do is to put the wires of the coil inside a magnetic field that is as strong as we can make it (within reason, of course). The easiest way to do this is to make the “gap” the coil sits in as small as possible (and, of course, to use as strong a magnet as we can fit or lift or afford to buy). So, let’s make a small gap for the coil to sit in.
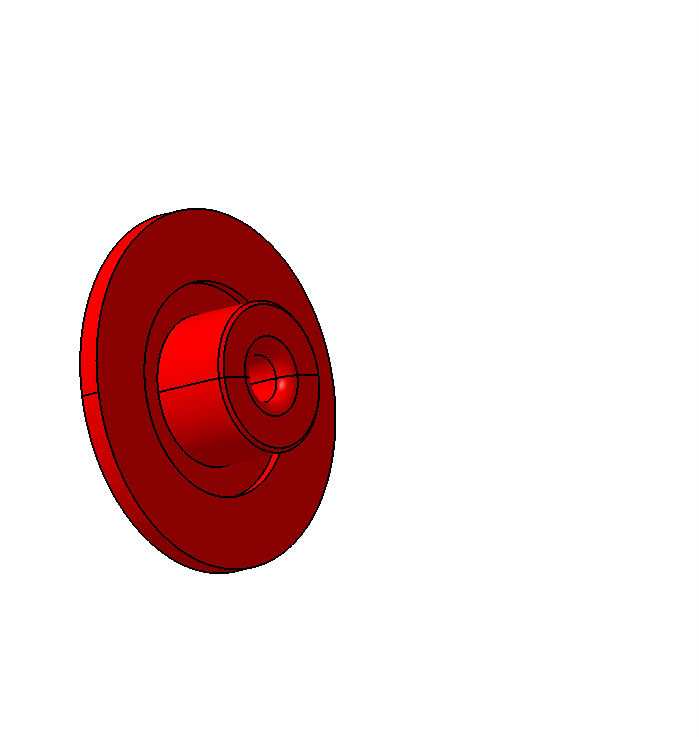
We start by making a “bottom plate” and connect a “pole piece” – this results in a shape that looks like a disc with a cylinder. It’s made out of soft iron because soft iron is a really good magnetic conductor. (In other words, if you stick a magnet on a piece of soft iron, the soft iron basically becomes an extension of the magnet without losing very much magnetic force.) That bottom plate and pole piece assembly is shown in Figure 4, below. I’ve made it red just to keep things clear later. It’s usually not red in real life.
Fig 4. The bottom plate and the pole piece, both typically made of soft iron.
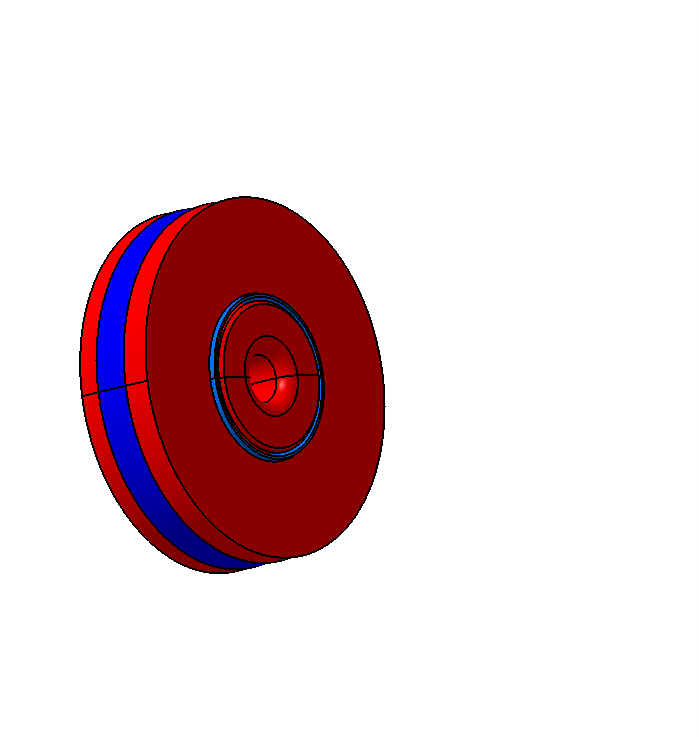
As you can see already, the “plug” in the middle of the magnet in Figure 3 is already visible as part of the pole piece in Figure 4. However, in order to make the strength of the magnetic field greater (in other words, in order to concentrate the magnetic lines of force) we want to make the gap (where the coil is going to sit) narrower. This can be done by making the cylinder on the pole piece a little bigger in diameter – but only where the coil of wire will be. That’s done by putting a ring around it, as is shown by the blue part in Figure 5, below.
Fig 5. A ring has been added around the pole piece to reduce the gap width. (Note that the gap doesn’t exist yet – we’ll need to put in a couple of more pieces first.)
Now we add the magnet as you can see in Figure 6.. This looks like a ring that sits on the disc part of the pole piece. The top of the ring is one pole (say, South) and the bottom is the other pole (say, North) of the magnet. However, this means that the North pole of the magnet is extended to the top of the cylinder on the pole piece because (as I said earlier) the soft iron is a good magnetic conductor.
Fig 6. The blue ring is the permanent magnet, typically made of ferrite or neodymium.
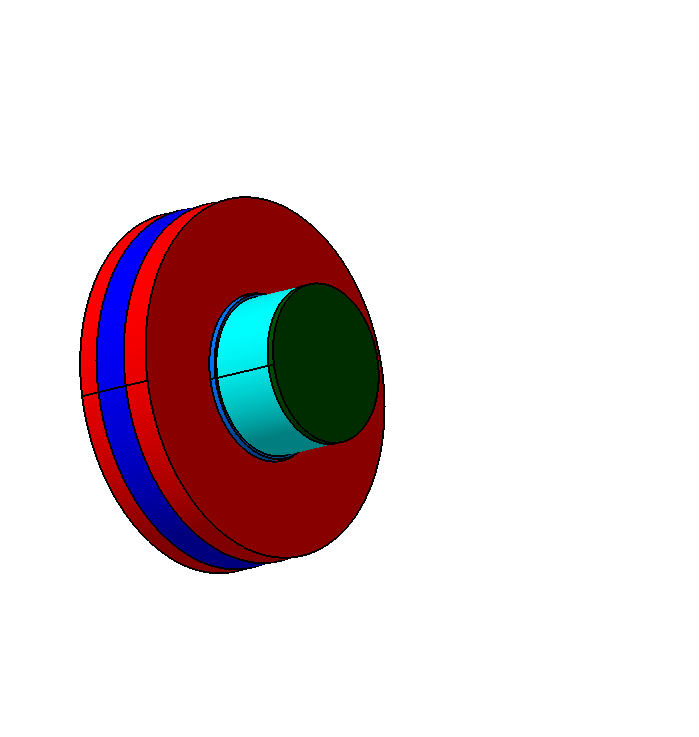
You can see in Figure 6 that the gap between the top of the pole piece and the magnet is pretty big, so let’s make it smaller by putting a “top plate” on the top of the magnet. This is another disc of soft iron, where the hole is just a wee bit bigger than the diameter of the ring around the top of the pole piece as shown in Figure 7. This means that the South pole of the magnet is now the inside edge of the hole in that disc, so we’ve made a circular gap (between the top plate and the ring on the pole piece) that is very small, and therefore has a very concentrated magnetic field.
Fig 7. The top plate, also made of soft iron.
Unfortunately, we can’t just make a coil of wire and stick it in the gap and hope that it’s going to behave. Instead, we take a roll of cardboard (or something else) – a bit like the cardboard tube in the middle of a roll of toilet tissue – and wrap the coil of wire on that. That cardboard roll that supports the coil is called the “former” – it’s shown in Figure 8.
Fig 8. The light blue tube is the former, around which the voice coil is wound. You can’t see the voice coil because it’s hidden by the top plate. (Actually, you can’t see it because I didn’t draw it – but if I had, you’d just see some wires sticking out from the gap – depending on the type of coil we had.)
One little extra piece of information here. Since the voice coil, sitting in a magnetic field is the system that essentially converts electrical energy into movement, we call it the loudspeaker driver’s “motor”. Of course, it isn’t a motor that causes something to spin – but it does cause something to move.
Great. Now we have the coil of wire (the “voice coil”) wrapped around the former, sitting in the magnetic field. So far so good. Now we can put current through the wire and it will want to move in or out of the magnetic (depending on which direction we’re sending the current in). Now, our first problem is that, even if the voice coil and former moved out and in, there is nothing there to push and pull the air molecules in front of it – so it won’t make a lot of noise. So, let’s start putting up a surface that can move some air. We’ll start by putting on a “dust cap” which seals off the end of the former. This is the bump that you see on the front of a woofer in the middle of the cone – so we’re starting to get out to the visible “pretty face” of the loudspeaker driver. The dust cap is shown in Figure 9. Note that the dust cap is not always the same diameter as the former. Note as well that it is usually, but not always convex. Note as well that some drivers don’t have a discrete dust cap (like the BeoLab 3 woofer, for example).
Fig 9. The dust cap has been added to the front of the former.
Now we have a problem. We can put current into the coil and get it to move, but there is nothing there to stabilise it. What we need is something to make sure that it doesn’t fall down when you put the loudspeaker on its edge (as most are…). So, we’ll put in a stabiliser. It has to keep the former centred in the magnetic gap, but it also has to be flexible to allow the former to move in and out of the magnet. This part of the loudspeaker is called the “spider” – it looks like a disc that has wiggles in it that can stretch as the former moves in and out. This spider is shown attached to the former in Figure 10. Note that its outside will attached to something else, later.
Fig 10. The spider has been added. It is glued to the former, but is not attached to the coil or the top plate.
Welcome to later. Now we need a frame to attach the outside edge of the spider and some other parts of the loudspeaker to – as well as to allow us to attach the whole loudspeaker to a cabinet. This part is called the “basket” – it doesn’t do much other than act as a structural support for everything – a bit like the steel beams in a building. The basket is shown in Figure 11. It may be interesting to note that the basket for an automotive loudspeaker driver is a little different from one for a home loudspeaker because it has to be able to deal with the possibility of a nasty accident. For example, a friend who knows such things once told me that it’s a bad idea to put a woofer intended for a home loudspeaker in a car door because if you’re ever in a side impact collision, it’s not inconceivable that the magnet will rip away from the basket, shoot across the car and cut your legs off. So now I’ve warned you…
Fig 11. The basket is glued and/or riveted to the top plate. In addition, the outside edge of the spider is glued to the basket.
Now we can put the rest of the loudspeaker parts on. We attach a “diaphragm” or “cone” which makes the moving surface bigger. That’s the medium-dark green part in Figure 12. If we left it at that, when we moved the loudspeaker in and out of the magnet, it would sag, because the spider isn’t strong enough to keep the whole thing vertical. So, we add a “surround” which is usually made of foam or rubber (or fabric, in the old days). The surround is a flexible ring that is glued to the basket and the edge of the diaphragm. It’s the lightest green thing in Figure 12.
Fig 12. An entire moving coil loudspeaker. The light green ring is the surround and the darker green ring inside it is the diaphragm or speaker cone, glued to the top of the former and the dust cap.
So, now when you put current through the voice coil, it pushes out of (or pulls into) the magnet and moves the former, dust cap and diaphragm with it. This causes the spider and the surround (usually grouped into what we call the “suspension”) to stretch.
Fig 13. A cross section of a (not very) simplified model of a moving coil dynamic loudspeaker driver.
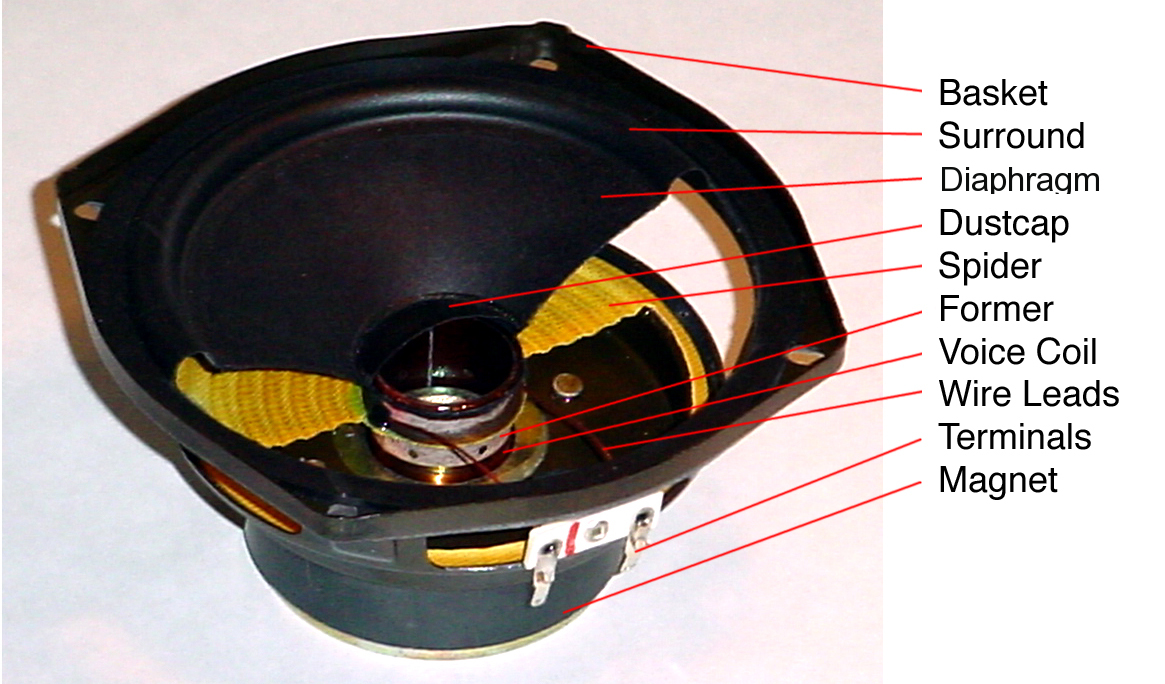
If we take the device in Figure 12 and cut it in half, we get a cross section like the one shown in Figure 13. And, just to prove that I’m not lying, I cut apart a real woofer – it’s shown in Figure 14. And then, not satisfied that I had done enough damage, I did it again to a BeoLab 3 woofer – those photos are in Figures 15 to 19. Another good example is this picture.
Fig 14. An actual moving coil dynamic loudspeaker, after I was very mean to it.
Fig 15. A BeoLab 3 woofer – after I was finished with it… You can see here that this particular loudspeaker driver does not have a separate dust cap and diaphragm. Also, you’ll notice that there is a flared cone that is used to connect the former to the outside edge of the diaphragm.
Fig 16. A BeoLab 3 woofer, showing some of the components.
Fig 17. A BeoLab 3 woofer, showing some more of the components. The magnet assembly is hidden inside the silver can at the bottom of the photo.
Fig 18. A BeoLab 3 woofer, showing some more of the components.
Fig 19. A BeoLab 3 woofer, showing some one more component.
That’s about it for this week. If you want to do a little more digging for yourself, you can look into things like the difference between overhung and underhung voice coils, neodymium vs ferrite, or just watch some relaxing, cool, tangentially-related videos like this one or this one or this one or this one. Or maybe just this.
Addendum
For the purposes of this explanation, I said that the top of the pole piece is the North pole of the permanent magnet, and the top plate’s inner edge is the South pole. However, there is no fixed convention for this. Manufacturers will almost always ensure that, when you put a positive voltage on the positive terminal of the loudspeaker, the diaphragm will move outwards. However, the north/south-ness of the magnet and the direction the voice coil is wound, and which end of the wire goes to which terminal vary not only from manufacturer to manufacturer, but model to model within one manufacturer’s portfolio.
One question that I am occasionally asked is why the BeoVision 11 is not able to decode audio signals encoded in Dolby TrueHD and DTS HD-Master Audio. I am not able to answer this question. However I can discuss what the implications are with respect to audio and, more specifically, audio quality in a playback system.
Before we start this discussion, let’s get a couple of terms defined:
LPCM: Linear Pulse Code Modulation. This is what most people call “uncompressed digital audio”. It’s the way digital music is stored on a CD, for example. It’s also the way digital audio is encoded to be able to send it around a computer or digital signal processor and do things like filter it, mix it, or just change the volume. So, at some point, in any system that has any digital audio signals anywhere in it (even if it’s just to change the volume, for example), it will be sending the signals around as LPCM-encoded audio.
CODEC: COmpression-DECompression. This is a way of encoding the LPCM audio signal so that it takes up less space (or less bandwidth). This is the audio equivalent of converting something to a “ZIP” file – sort of. Some CODEC’s are “lossless” – meaning that, if you take a signal, compress it and decompress it, you get back everything you put in – a bit-for-bit match of the original. (If you didn’t, it wouldn’t be “lossless”). Other CODEC’s are “lossy” – meaning that, when you compress the signal, some stuff is thrown away (this is why audio professionals call lossy CODEC’s like MP3 “data reduction” instead of “audio compression”). Hopefully, the stuff that’s thrown away is stuff you can’t hear – but that debate is best left out of this discussion.
Bitstream: Some Blu-ray players allow you to choose whether you send the audio data that’s on the disc directly out its digital output, unchanged OR to decode the audio data to LPCM before sending it out. Typically, this shows up in the menus on the player as a choice between sending “bitstream” or “LPCM”. So, for the purposes of this article, I’ll use these two terms as meaning those two things. However, if we’re going to be accurate, this is an incorrect definition, since an LPCM signal is a stream of bits, and therefore is also a bitstream. But now I’m being purposely punctilious…
Let’s start this discussion by building a fairly standard home theatre system. We have:
A Blu-ray player connected to…
A BeoVision or BeoPlay television or a BeoSystem X OR some other brand’s AVR (Audio Video Receiver) or Surround Processor via an HDMI cable
which is connected to…
A surround sound setup with 5 or 7 main loudspeakers (some of those might be inside the television) and maybe a subwoofer, all connected to the television using power amp, or line level (or PowerLink, for B&O customers) connections
Let’s also assume the following:
The Blu-ray player is connected to the television’s input with an HDMI cable.
Both the Blu-ray player and the television (or AVR or Surround Processor) have been certified by Dolby and DTS to decode all the encoding formats in which we’re interested for this discussion
(note that this is not true of all devices in the real world – but we’ll use the assumption for now).
The player does what you tell it to do. In other words, if you set its output to bitstream, it sends the stream of bits that are on the disc it’s playing – and nothing else.
The question is: What format should I use to send the audio signals from the Blu-ray player to the television? Should I set my Blu-ray player to send a Bitstream to the television and decode the audio signals there? Or maybe it’s better to tell the Blu-ray player to decode the signals and send LPCM to the television.
The answer, unfortunately, is potentially complicated… but let’s look at what the implications are for the two options.
Audio Quality
If you do a search on the web, you’ll find all sorts of answers to this question. Some of the answers are correct, some are partly correct, and some are just plain wrong – actually, some aren’t even wrong.
The basic reason for this is that Bang & Olufsen, like every other company that manufacturers audio/video components that support these formats must adhere to a very strict set of regulations that are set by Dolby and DTS in order to receive certification for our products. Also, before we can deliver a new product to our dealers, it must be thoroughly tested by both Dolby and DTS to ensure that we meet their exacting standards for their formats. In other words, a Dolby TrueHD decoder is a Dolby TrueHD decoder – regardless of what the box it’s in looks like.
This means that every device that is certified to decode Dolby TrueHD or DTS-HD Master Audio and convert that format to an uncompressed PCM audio signal (footnote: the “standard” format that is used by the internal Digital Signal Processing (DSP) of the device) does that decoding in the same way. This is true whether the device is a Blu-ray player, a DVD player, an AVR, or surround sound processor. Note that this does NOT, however, mean that a loudspeaker connected to any of these devices will give you the same sound quality – there are many, many other links in the audio chain that have an effect on sound. It merely means that the conversion from a compressed (either lossy or lossless) signal to an uncompressed signal will be identical, regardless of where it’s done.
So, whether:
you decode in the player and send PCM to the television, OR
you send the bitstream to the television and decode the signal there,
there is no difference in audio quality
Now, you might tell me “But I went to a user forum and saw a posting from a person who did a test with his Acme Blu-ray player and his Flybynight AVR and he reports that he can EASILY hear the difference in quality in the audio when he changes from LPCM to Bitstream on his player.” This may, in fact, be true. However, the reason that there is an audible difference is not due to one of the devices having a better decoder or some very minor issue like jitter on the HDMI signal. There are at least two very basic and very simple explanations as to why this might happen.
The first is a simple level difference. If you do an ABX test of a system where A or B is 1 dB louder than the other, but are identical in every other aspect, your listening test subjects will have no difficulty identifying what X is. (An ABX test is one where you can listen to 3 things – an “A”, a “B” and an “X”. “X” is guaranteed to be identical to either “A” or “B” (which are guaranteed to be different). Your task is to identify whether “X” matches “A” or “B”. So, if the Bitstream is just 1 dB (or less!) louder than than the LCPM version, then you will hear a difference – although you might not notice that the difference is a simple loudness. It’s likely that you will perceive the louder one as just being “better”.
The second is that some AVR’s can be set to apply different post processing to LPCM signals than they do to signals decoded internally. So, it’s possible that there could be something as simple as a bass or treble difference between the two signals – but it could be something as complicated as a lot of spatialisation and reverberation with a big EQ curve – or anything in-between. So, in this case, the difference between Bitstream and LPCM coming in from the player is in the post-processing differences in the AVR.
However, as I said, this is not the full story. Let’s look at more pieces of the puzzle to see what the differences are.
Audio during fast-forward / fast-rewind
Different players behave differently when you are fast-forwarding or fast-rewinding through a disc. If you are sending an encoded bitstream from the player, many devices will not deliver any audio when you are moving through your disc at a higher speed. This behaviour is different from brand to brand and model to model. However, in many cases, these same players WILL deliver audio if the output is set to PCM.
Listening Levels
In a theory, there should be no difference in audio levels (i.e. how loud the signals are) caused by moving from a decoder inside your player to one inside your television. However, as I mentioned above, this world isn’t perfect – and one of the results of that imperfection is that there may, indeed, be a difference in level caused by switching from a bitstream to a PCM output from the Blu-ray player. If this does happen, then it’s likely because of some extra (or different) post-processing that is happening to the signal(s).
Mixing of Extra Audio Channels
One of the cool features of DVD and Blu-ray (that I, personally, never use) is that you can watch a movie whilst listening to the director (or someone else) talk about the movie – a feature usually called “Commentary” or something like that. This is fun, because there’s nothing that can make IronMan 3 more interesting than hearing about how someone accidentally spilled a cup of coffee on their computer keyboard while they were rendering a 3D CGI version of an Audi falling into the ocean.
In order for this feature to work, the system has to take the audio signals for the movie and mix in an additional audio channel. However, some players are not able to mix these two sounds together if they’re outputting a bitstream. They can only do it if they’re decoding the movie AND the commentary separately, and then mixing the two LPCM streams. Of course, to then re-encode the result, just to send out a bitstream would be silly.
Another example of these extra sounds that may not make it through a bitstream output are the “clicks” or cute noises that are assigned to menu items.
So, with some players, if you want to hear these extra sounds, you’ll have to output a decoded LPCM stream.
Channel Allocation and Routing
This is where things get a little debatable. Usually, when people say “5.1” they mean the following channel allocations (in no particular order)
Left Front
Centre Front
Right Front
Left Surround
Right Surround
LFE
And, when they say “7.1” they mean
Left Front
Centre Front
Right Front
Left Surround
Right Surround
Left Back
Right Back
LFE
We’ll call these the “standard audio channel allocations” for this article. However, as I talked about it a previous article, “7.1” actually has seven “legal” variants that include non-standard audio channel allocations like front-wide and height channels.
Let’s assume, temporarily, that you have a disc that has some audio channels on it that should be routed to, say, a ceiling loudspeaker. The question is: “IF your surround processor has a “ceiling speaker” output, and IF there is a “ceiling” audio channel on the disc, can the signal get to the correct loudspeaker?” The answer is complicated. . .
Firstly, the question is “how can the disc ‘know’ that the audio channel is a ‘ceiling’ channel?” Well, both Dolby TrueHD and DTS HD-Master Audio (for example) have the option to include “metadata” (this is a fancy word meaning “data about the data” – or, in other words “information about the audio signals”) that can tell the decoder something like “audio channel #6 should be sent to a ceiling loudspeaker”. Other CODEC’s (like Dolby Digital, for example) do not have the possibility to have non-standard audio
Secondly, the question is “if the player decodes the signal to LPCM, and its decoder knows that the channel should be routed to the ceiling, can it ‘tell’ the surround processor via the HDMI metadata where to route the signal?” The answer to this question is dependent on the version numbers of the HDMI transmitter in the player and the HDMI receiver in the surround processor. If you are using HDMI 1.3 or earlier, then you cannot have non-standard channel allocations with an LPCM signal. If you have HDMI 1.4 or higher (for both the transmitter and the receiver) you might be able to get the correct metadata across from device to device. (if you look here, you can see that, if your HDMI transmitter or receiver is version 1.2 or earlier, then you cannot send the Dolby or DTS lossless codec’s – so this will also not work for non-standard channel allocations.)
So, the only way to guarantee that your complete system can support non-standard audio channel allocations (assuming that your surround processor has the ability to output them) is to send a bitstream from the player and decode at the end of the chain.
However, the question to ask after you’ve answered all of that is “how many commercially-available recordings include non-standard audio channel allocations?” The answer to this, as far as I’ve been able to figure out is “none”. (If you know of any examples of this that prove me wrong, please leave a note in the “replies” – I’m looking for materials! But read the rest of this paragraph first…) Of course, there are SACD’s where the LFE channel should be directed to a height channel – but SACD’s don’t include metadata to tell the player about the routing. Dolby ProLogic IIz and dts Neo:X have height channel outputs, but that’s a different system than a CODEC with discrete output channels. There are some other formats like Imax, Auro3D, and Dolby Atmos that use height channels, but they’re not available in consumer media.
So, this, at least for now, is an solution without a problem.
Bass Management
Some Blu-ray players (and even some good ol’ DVD players) include a bass management system that will filter the bass out of the main channels and add it to the LFE output.
IF your player can do this, then:
it can only do it to a decoded signal – so the bass management in the player will not work with a bitstream output
you should be sure that it is doing it (if you want it to do so) or that it is not doing it (if you don’t)
Latency
Some forum discussion groups have highlighted an issue with some specific players that exhibit lip-synch problems when they decode the signal to LPCM internally. The few comments about this that I have read in these fora indicate that switching the player’s output to bitstream appears to fix this problem. However, this should be considered a “work-around” for a bug in the player’s software. There should be no difference in synchronisation of sound and picture whether you’re decoding in the player or the surround processor. If there is a lip synch problem, then the people that made the player haven’t done their jobs properly.
Conclusion
So, to wrap up: the big things to remember here are that,
in any audio playback system, audio that is stored (and/or transmitted) in a CODEC has to be converted to LPCM somewhere
there is no difference in quality of decoder – in other words a Dolby (or DTS) decoder in one device won’t be better than a Dolby (or DTS) decoder in another device. If it were, then Dolby (or DTS) would not have approved one of them
there are some issues not related to audio quality that are affected by the location of the decoder in an audio chain, but these are typically very small (or even non-existent) issues for almost all consumers
Finally, I didn’t talk about jitter – which is term that a lot of people throw around as being one of those evils in every audio system where you can place all of your blame for everything that is bad about the system. This puts it in a league with things like “society“, “television“, “Canada“, and “The Boogie“. I’ll talk about that sometime in the future.
One last thing
Everything I’ve said above is only true for an HDMI connection. If you have an S/P-DIF or TOSLINK connection, then the discussion will be quite different, since you cannot have more than 2 channels of LPCM-encoded audio on those systems – so the only way to get multichannel audio through it is to use a lossy CODEC. So, if you have a multichannel source and you decode to LPCM before sending it out on S/P-DIF or TOSLINK, you will wind up with a 2.0 channel downmix.
Makes: One individual with reduced faith in loudspeaker reviews
Total time: approximately 2 hours
Directions
Take a woofer and put it in a cabinet
Connect an amplifier to it
Put it in a sauna
Set the room temperature to 20° C and wait until everything in the room is the same temperature
Measure the woofer’s on-axis response with a microphone
Look at the pretty plot of its magnitude response
Turn up the thermostat to 100° C and wait until the woofer warms up
Measure the response again
Look at the new pretty plot of its magnitude response
Scratch your head while you ask yourself why the two measurements look so different.
The setup
When you read a magazine review of a loudspeaker, it will include a measurement of its “frequency response” (more accurately called its “magnitude response”) which shows (ignoring a bunch of things) how loud different frequencies are when they come out of the loudspeaker assuming that they all came in at the same level.
However, as we saw in a previous article, for a Bang & Olufsen loudspeaker, this magnitude response is dependent not only on the loudspeaker, but how loudly you’re playing the signal.
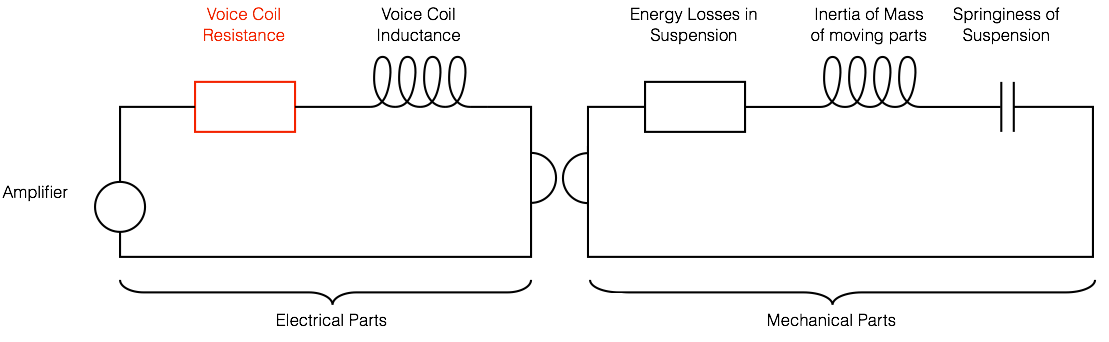
Unfortunately, it gets much worse than this… For example, if we take a woofer (say, the one from the recipe above, for example) we can explain its electromechanical characteristics by breaking it down into different components (both actual and analogical). For example, the suspension (which is comprised of the surround and the spider) can be thought of as a spring. The electrical analogy for this is a capacitor. If you take all of the moving parts in the loudspeaker driver, they all add up to a mass that has to be moved – the electrical analogy for that mass is an inductor (since an inductor has some electrical “inertia” just like the mass of a bunch of loudspeaker bits). Some of the components are not an electrical analogy – they are real electrical components. For example, the voice coil, since it’s a coil, acts as an inductor. And, since it is a thin bit of wire, it also has some resistance to the flow of electrical current through it, so it’s also a resistor.
Fig 1. A simplified version of the actual electrical and electrical analogies of mechanical components in a loudspeaker driver.
If you look at the diagram above, you’ll see a very simplified “circuit” that shows the components of a moving coil dynamic loudspeaker. If these components don’t look familiar to you, don’t worry, it’s not important. Some components in the circuit are actual electrical things (like the resistance of the voice coil, shown in red) and others are analogies – electrical representations for a mechanical component in the system (such as a capacitor representing the “spring” of the surround and the spider).
If you know how each of these components behaves, and you know the correct values to put in for a given loudspeaker, and you know how to do the right math, then you can come pretty close to getting a decent prediction of the response of the loudspeaker that you’re modelling with the circuit. However, if you just put in one value for each component, then you’re assuming that they never change – in other words that you’re dealing with a “linear” system.
The problem is that this assumption is incorrect. For example, the Voice Coil Resistance – the amount that the wire in the voice coil resists the flow of current through it when the loudspeaker driver is not moving – changes with temperature. The hotter the wire gets, the higher the resistance goes. (This is a normal behaviour for most resistors.) If the voice coil resistance changes, then the whole system behaves differently, since it isn’t the only component in the circuit. So, as we change the temperature of the voice coil, the total response of the loudspeaker changes.
Sadly, the temperature of the voice coil isn’t only dependent on the room temperature as it seemed to be in our recipe for a Befuddled Speaker Enthusiast. As soon as you start playing sound with a loudspeaker, it starts heating up. The louder the signal (either because you turned up the volume or because your Metallica album just came on) the hotter it gets. So as you play music, it heats and cools. The speed with which it heats up and cools down is dependent on its “thermal time constant” – a big woofer with a giant magnet will take longer to heat up and cool down (and therefore have a longer thermal time constant) than a little tiny tweeter.
So, now you should have at least three questions that deserve answers:
How much does the temperature vary when I play music?
How does the response of the loudspeaker change with temperature?
How much does the response of the loudspeaker change with temperature?
What are you going to do about it?
1. Voice coil temperature
As I’ve talked about in a previous article, a loudspeaker driver is, give or take, about 1% efficient. That means that 99% of the power that you push into it (from the amplifier) is not converted into sound. Unfortunately, all of that power is lost as heat – almost all of it at the voice coil of the loudspeaker. So, the louder your music, the hotter your voice coil gets. Of course, if you have a way of cooling it (by using other parts of the loudspeaker as a radiator to your listening room) then it won’t get as hot, and it will cool down faster.
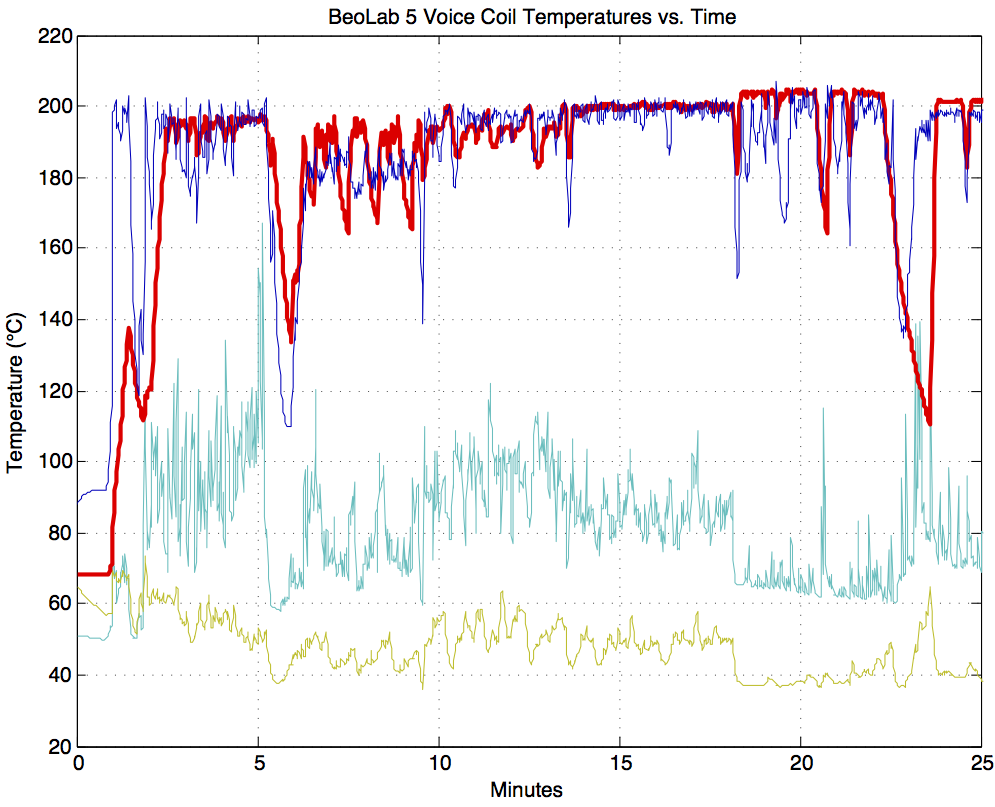
Let’s take a BeoLab 5 as an example (since that’s where we’re headed anyway…). Let’s take some relatively new-ish pop music (which has been mastered to be fairly loud due to a war that has been going on for years) and play it on a B&O player through Power Link (B&O’s version of a line level signal) at maximum volume on a BeoLab 5 whilst monitoring the temperature of the voice coils. What you’ll see if you do this is something like the plot below.
Fig 2. The temperatures (in °C) of the voice coils of the four drivers in a BeoLab 5 as a result of playing pop music at full volume on a BeoSound 5. The X-axis is the time in minutes. (green = tweeter, light blue = midrange, dark blue = mid woofer, red = woofer)
As you can see in the screenshot in Figure 2, the lower woofer (a 15″ driver connected to a 1000 W Ice Power amplifier) varied with a maximum of about 205° C. While it was playing this music at this level, it rarely dropped below 120°C.
This means that the difference in temperature of the woofer was 185°C at a maximum (205°C – 20°C) and rarely below 100°C.
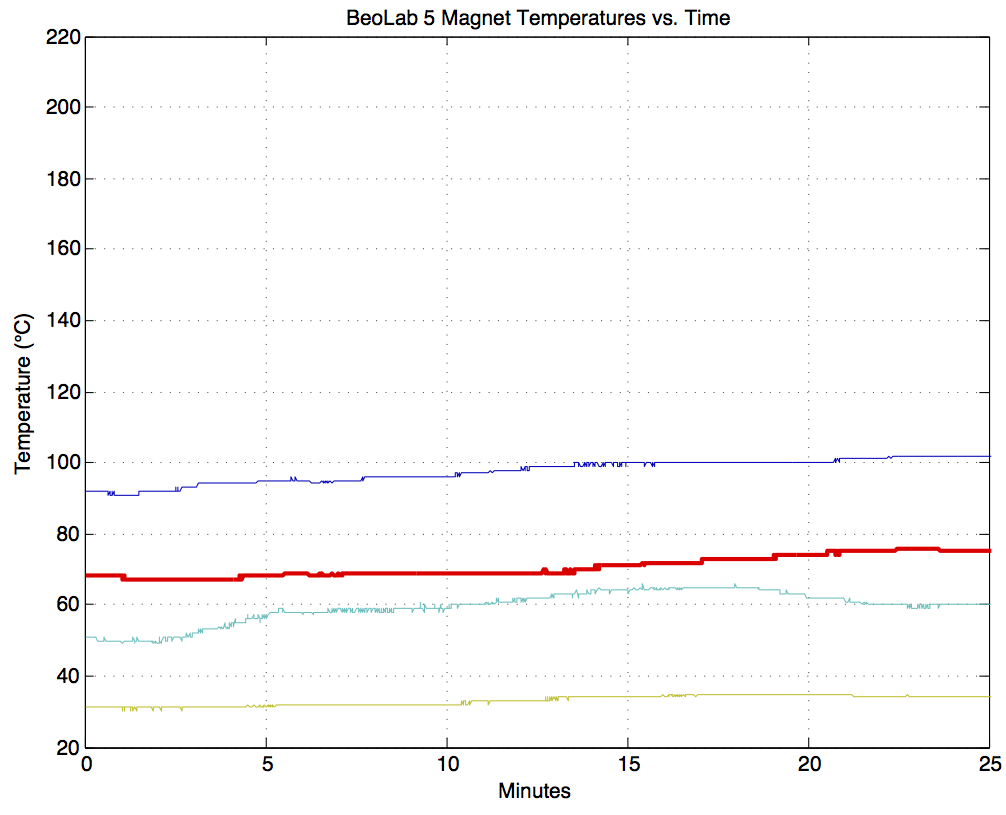
In case you are wondering, this temperature cannot be measured directly, since it would destroy the voice coil if we tried to do so. Instead, what we do is to measure the temperature of the loudspeaker driver magnets, and use that real-time data input in addition to the signal that we’re sending to the drivers to calculate the temperatures of the voice coils based on thermal models of each of them. As you can see in Figure 3, below, the magnet temperatures are very different, and react much more slowly. These measurements were taken at exactly the same time as the ones shown in Figure 2. (Note that, although the mid woofer and woofer voice coils are roughly the same temperature, the mid woofer magnet is hotter than the woofer magnet by about 20°C or so. This just proves that their thermal models are different.)
Fig 3. The temperatures (in °C) of the magnets of the four drivers in a BeoLab 5 as a result of playing pop music at full volume on a BeoSound 5. The X-axis is the time in minutes. (green = tweeter, light blue = midrange, dark blue = mid woofer, red = woofer)
2 & 3. Loudspeaker response changes
So, now the question is “what does this change in temperature do to the response of the driver?” We’ll only deal with one driver – the woofer.
As I mentioned above, the thing that changes most in the model shown in Figure 1 is the loudspeaker driver’s voice coil resistance. For those of you with a background in reading electrical circuits, you may notice that the one shown in Figure 1 has some reactive components in it which will result in a resonance at some frequency. For those of you without a background in reading electrical circuits, what this means is that a loudspeaker driver (like a woofer) has some frequency that it “wants” to ring at – if you thump it with your thumb, that’s the frequency that you will hear ringing – a bit like a bell with a low pitch.
As the voice coil resistance goes up, its resistance increases, and we generally lose sensitivity (i.e. level or loudness) from the woofer. In other words, the hotter it gets, the quieter it gets. However, this only happens at the frequencies where the resistor is not “overridden” by another component – say the mechanical resonance of the woofer or the inductance of the voice coil.
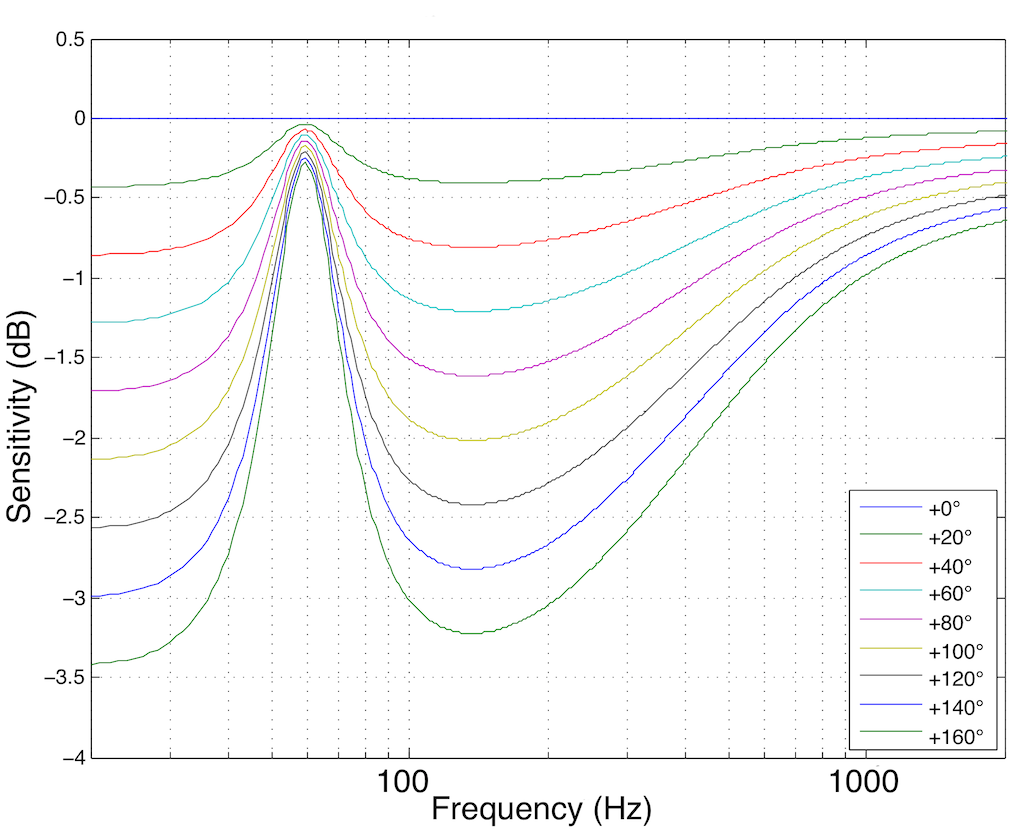
The total result is shown for various temperature differences in Figure 4. Notice that these plots show the change in magnitude response of the driver with CHANGES in temperature. So, the blue curve at the top is the change in magnitude response (which is 0 dB at all frequencies – in other words no change) when the loudspeaker is playing at the same temperature it was measured at (let’s say, 20°C or room temperature). As the temperature of the voice coil increases above that temperature, you can see that you lose output in two frequency bands on either side of a “bump” in the response – this is at the resonant frequency of the loudspeaker driver.
So, the louder you play, the more low end you lose, apart from a peak in the response (which also rings in time) at the resonant frequency of the driver.
Fig 4. Sensitivity of an example woofer vs. the change in temperature of its voice coil in degrees Celsius
In case you’re wondering, the plot shown in Figure 4 is pretty close to the actual response of the 15″ woofer in the BeoLab 5 at different temperatures above room temperature.
The solution
Interestingly, all of the stuff I said above is true for every loudspeaker. So, if you’re the kind of person who believes that the only proper loudspeaker is one where you have nothing but a loudspeaker driver (in a cabinet of any kind, or not) and an amplifier – and no weird filtering or mucking-about going on, then you’ll have to live with the kind of unpredictable behaviour that you see above. This happens all the time to every dynamic loudspeaker. Since, in a passive loudspeaker, there’s nothing you can do about this (except for trying to keep the drivers cool somehow) you don’t often hear passive loudspeaker manufacturers talking about this little skeleton in their closet…
However, since a BeoLab 5 “knows” the temperature of the voice coil of the woofer, and since it has been programmed with the curves shown above in Figure 4, we can do something about it.
In essence all we need to do is to take Figure 4, flip it upside down and make a filter that “undoes” the effect of temperature on the loudspeaker’s response. In other words, if (because the woofer gets 160°C above “normal”) it drops 3 dB at 20 Hz, the BeoLab 5 knows this and adds 3 dB at 20 Hz. So, built into the BeoLab 5 is a set of filters that are used, depending on the temperature of the woofer’s voice coil. These filters are shown in Figure 5.
Fig 5. Magnitude responses of the compensating filter for the woofer from the previous plot vs. the temperature of its voice coil in degrees Celsius
It’s important to note three things here.
This can be done because we know the behaviour of the woofer at different temperatures (this was measured as part of the development process)
This can be done because the loudspeaker “brain” (the DSP) knows the temperature of the voice coil in real time as you’re playing music
This filter should only be applied to the woofer. The mid woofer and the other drivers have different behaviours and should not be affected by this correction curve. Therefore, this filtering can only be done because the BeoLab 5 is an active loudspeaker with independent filtering for each loudspeaker driver.
Some extra information
You should be left with at least one question. I said above that, as the music gets loud, the woofer heats up, so you lose output, so we add a filter that compensates by putting more signal into the driver.
“Waitaminute!” I hear you cry… “The problem is caused by the signal being too loud, so you make it louder!?” Well… yes.
However, there is one more trick up our sleeve. In a previous posting, I mentioned in passing that we also have Thermal Protection in almost all of the loudspeakers in the B&O portfolio. This means that the DSP brain knows the temperature of the drivers and, in a worst-case situation, turns the levels down to protect things from burning up. So, if we go back to the example of a BeoLab 5 playing at full volume, let’s see what’s happening to the signal levels.
Fig 6. The gains (in dB) applied to the signals sent to the four drivers in a BeoLab 5 as a result of playing pop music at full volume on a BeoSound 5. The X-axis is the time in minutes. (green = tweeter, light blue = midrange, dark blue = mid woofer, red = woofer)
These curves in Figure 6 show the gains applied to the four loudspeaker drivers in a BeoLab 5 at the same time as the measurements shown in Figures 2 and 3 were being made. In fact, if you look carefully at Figure 2 around the 23 minute mark, you’ll see that the temperature dropped – which is why the gain in Figure 6 increases (because it can!) in response.
Now, don’t panic. The BeoLab 5 isn’t screwing around with the gains of the drivers all the time. Remember that this test was done at FULL VOLUME – which, for a BeoLAb 5 is VERY LOUD. The gains shown in Figure 6 are a last-ditch effort of the loudspeaker to protect itself from a very mean customer (or the very mean children of a customer who is away for the weekend). This is the equivalent of the airbags deploying in your car. You know that if the airbags are outside the steering wheel (or if the gains in the BeoLab 5 dropped by 15 dB or so) something significant occurred…
Thanks to Gert Munch for his help in cleaning up the mistakes I made in the drafts up to and including the penultimate version of this article.
























{kind=link}