“P.S. As I mentioned briefly in this posting, Active Room Compensation has one additional feature – multichannel processing. That will be explained later in Part 2.”
So, that’s the theme for this article – the multichannel aspect of Active Room Compensation.
A monophonic view
Let’s start by looking at Figure 1, below.
This is a basic representation of the fundamental room mode in one dimension of a room. If a loudspeaker is placed at the location of the red circle and it produces energy at the same frequency of the room mode, then the room will resonate, just like a closed pipe, as can be seen in the animation.
One important thing to notice in the figure above is that when the pressure on one side of the room goes positive, the opposite side goes negative. In other words, the two sides of the room are in opposite polarity. This information will come in handy later.
Now let’s look at the second harmonic – this is a resonance that has a frequency that is two times that of the fundamental mode. Its behaviour in one dimension of the room is shown below. Again, the loudspeaker is in the position of the red circle.
Now, you’ll notice, the two sides of the room have the same polarity – when one goes positive, so does the other. It’s the centre of the room that is in opposite polarity to the sides.
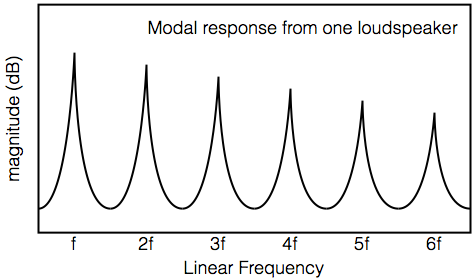
If you measure the natural response of a loudspeaker that is otherwise flat (let’s not split hairs over whether we’re talking about on-axis magnitude response or the power response – for the purposes of this discussion, it’s irrelevant) in a one-dimensional room like the one shown above, you’ll see that there is a natural peak in the response at each frequency where you have a room mode. The result will look something like Figure 3, below
Figure 3: The simplified response of a loudspeaker in a one-dimensional room, showing the effects of room modes, but nothing else… Figures 1 and 2 correspond to the frequencies “f” and “2f” in this plot.
As you can see there, every mode is excited by the loudspeaker (we’re assuming that the loudspeaker is not sitting on a “node” and therefore not coupling to the room mode at all).
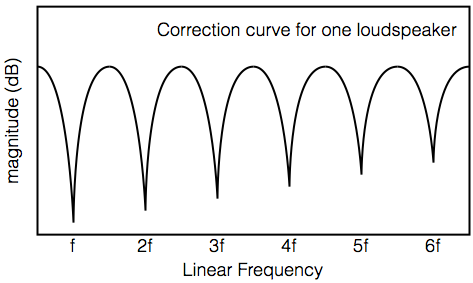
So, if you build a room compensation system that only takes one loudspeaker into account, then it will measure a response similar to the one in Figure 3, and it will create a compensation filter that looks something like the one shown in Figure 4.
Figure 4: A simple compensation filter created to “undo” the effects of the room response displayed in Figure 3. In a simplest implementation, this is just the inverse of the room response.
Assuming that you’re careful about your measurements, and you consider things like phase response in your creation of the filter, this system will work very well with just one small problem: most people don’t use only one loudspeaker – they use at least two.
So, how does this change things?
Now, in stereophonic sound*!
Let’s go back and consider our room modes again, this time with two loudspeakers.
Figure 5, above, shows the same room as in Figure 1, but now I’ve plotted the locations of two loudspeakers, one on the left (atypically, in red) and one on the right (in black). Notice that these two points in the room, when the room mode is ringing, are opposite in polarity (or “out of phase” as many people say…). However, consider that, in most recordings, the bass (which is, in most cases, a good estimation of the frequency band of the fundamental room mode) is panned to the centre, and therefore is “in phase” in the two channels.
In other words, in almost all cases, the two loudspeakers are producing the same signal at the same level, in phase (and therefore with the same polarity). However, the room is ringing in opposite polarity at the two loudspeakers.
What’s the result of this conflict? It’s simple – the room mode is naturally cancelled by the signals in the loudspeakers. In other words, there is no need to apply room correction for a recording like this, with the loudspeakers in the locations that they’re shown in, for this room mode.
So, if you measure each loudspeaker individually, you’ll put a dip in their responses that should not be there to compensate for a room mode that is not ringing. You must consider both loudspeakers playing a correlated signal, and how that will interact with the room mode.
Now let’s look at the next harmonic, shown below in Figure 6.
Now you can see that the mode is ringing in the same phase at the two loudspeaker positions. So, if the bass (still a good guess…) is in phase in the two channels (also a good guess…) then this resonance will be twice as bad as it would be with only one loudspeaker. Again, we need to consider the behaviour of the room mode with a correlated signal in the two loudspeakers – but this time things are worse instead of non-existent.
So, this means that we have to re-consider our room compensation filter. Instead of measuring each loudspeaker independently and building a filter for each one and ignoring that people rarely listen in mono, we have to measure the two (or more) loudspeakers and analyse the way that different signals will interact with the room modes.
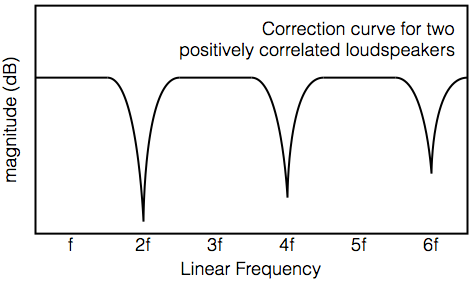
For example, in the simple case shown above, we might wind up with the two filters shown in Figure 7 and 8.
Figure 7: A compensation filter for a signal that is directed to two loudspeakers with the same polarity in positions shown in Figure 6. Notice that it is only necessary to compensate for the even-order modes.
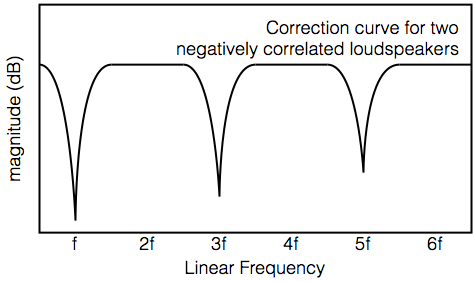
Figure 8: A compensation filter for a signal that is directed to two loudspeakers in opposite polarity in positions shown in Figure 6. Notice that it is only necessary to compensate for the odd-order modes.
Now, you might be saying “I understand Figure 7 – lots of signals have the same polarity in the two loudspeakers (like the vocals, the bass, the kick drum – anything panned to the centre). But what signals are out-of-phase if I’ve connected by loudspeakers correctly?”
The answer to this comes mainly from classical recordings where it is normal to use microphones (usually omnidirectional) that are spaced apart. In this case, signals enter the two microphones are different times (depending on the angle to the sound source) – and a time difference results in a phase difference.
This processing is done in Beolab 90‘s Active Room Compensation to ensure that the loudspeakers are best optimised, not only to the room they’re in, but their locations within it, and its interaction with the recordings you’re playing. The end result is that each loudspeaker “knows” that the other one is in the room – each not only considers the other’s effect on the room’s response, but they “help each other” to control the room modes.
Of course, I’ve left out a lot of details in this description – for example, the actual responses of the correlated and negatively correlated signals will not really look like the ones I’ve shown here; most rooms contain more than one dimension; and I haven’t talked about boundary effects. In addition, everything I’ve said here is just an example using a very simplified view of the universe. The measurements of the loudspeakers at the microphone positions will result in very different responses than the ones shown here, which will, in turn, result in very different compensation filters.
*Most people don’t seem to know it, but “stereophonic sound” (or “stereo” if you’re into the whole brevity thing) means that you have two or more audio channels. Just thought I’d be explicit here – in case anyone was wondering.
“B&O has also succeeded in using all that technology to serve the music: the BeoLab 90’s sound quality equaled the general performance of any other speaker I’ve heard, and exceeded them in the resolution and stability of the sound-stages the pair of them presented.” (Kal Rubinson)
“For now, I exhort every caring music listener to listen to the BeoLab 90 and hear what is now possible. It’s that good. (KR)
“To say how impressed with how the BeoLab 90 measured in its Narrow mode would be an understatement. This loudspeaker demonstrates just how much can be achieved with intelligent use of DSP to optimise its acoustic performance. As Kal Rubinson summed up, it is a tour de force. Wow! (John Atkinson)
“Lyden av BeoLab 90 er vanskelig å forklare, den må egentlig bare oppleves. Personlig har jeg aldri hørt en mer livaktig musikkgjengivelse, og flere som har vært på besøk reagerte med å klype seg i armen eller felle en tåre når de hørte et opptak de kjente, eller rettere sagt trodde de kjente!”
“The sound of the BeoLab 90 is hard to explain, it must really be experienced. Personally I have never heard a more lifelike music reproduction, and several who have been visiting reacted by pinching their own arm or shedding a tear when they heard a recording they knew, or rather thought they knew!”
From fineartofliving.de: “Fazit: Bang & Olufsen BeoLab 90 – Die Zukunft des Klangs? Die Antwort darauf: Nach unserer Meinung zurzeit eine, wenn nicht sogar die beste Möglichkeit für optimales Klangerlebnis im High End-Bereich. Mit einer Einschränkung: Selbst angesichts des nicht minder beachtlichen Preises kann es aufgrund der hohen Nachfrage zu Lieferengpässen kommen…..
From www.hificlube.net: High End 2016 – Munich – Best Sound: Runner-up – “My colleague Martin Colloms wrote a long feature article about the Beolab 90 for Hificritic. Still I wasn’t ready for what I heard. An immersive holographic sound even when I was sitting no more than 5 feet away from the loudspeakers. Excellent focus, amazing localization of musicians and singers in the huge and deep soundstage. Maybe a hint of upper mid emphasis. To say that I am amazed is an understatement. It gets an A verging on the A+…”
Press reviews from CES 2016
soundstagehifi.com: “…this demonstration was, by far, the best I heard – and the BeoLab 90 was my favorite product – at CES 2016.”
stereophile.com: “The sound was incredibly dynamic but relaxed. This was the best bass I heard at the show, and the most startlingly different soundstaging and midrange I experienced during CES 2016.
“The question I’ve been asked at every CES more often than any other is “Which sound system impressed you the most?” It’s a question that’s often difficult to answer. Typically, I’ve been impressed by several systems, often for different reasons, and it’s hard to say which was “the best.” That is, except at CES 2016. This time, I had no trouble answering this question: the BeoLab 90. The sound was utterly natural, effortless, with outstanding soundstage and imaging. I also couldn’t help but be impressed by the technology represented by this speaker system: 18 drivers of the highest quality, 18 amplifiers, full DSP control, cast aluminum enclosure. Given the components and the extensive research that went into the design of the speaker, $75,000 for the pair does not seem excessive.”
digitaltrends.com: “When we sat down for a short audition, we were gobsmacked by what we were hearing. Though we were in the very back of the room with enough people blocking our sight of the speakers that we could barely see the system, we heard a perfectly balanced presentation with the vocals seemingly coming from directly in front of us, just 2 feet away (someone’s head was in that spot).
Aside from all of the sound balancing and noise-cancelling tricks, the systems balance throughout the frequency spectrum was truly impressive. The Beolab 90 is easily the finest-sounding speaker the company has ever made, and it’s extremely exciting to listen to. The bass … oh, the bass! We were treated to deeeep, extended bass with tons of punch and iron-fisted control. The rest of the speakers’ response was also remarkably realistic.”
audio-head.com: “From common audiophile test tracks to a sweet spot rotation, whoever was leading the charge at the company certainly seemed vastly familiar with the hobby’s eccentric standards. The sound of the BEOLAB 90 followed in suit, the quick listening session yielded surprisingly tight image and responsive dynamic range. The bass was big, properly proportioned and beautiful in a way that reminded me of other high end rigs that play in this price range. Overall, it felt like a very impressive presentation that didn’t disappoint, checking off boxes left and right for both the audiophile and the luxury lifestyle listener.”
AVSforum.com: “These speakers have real guts, and yet possess more finesse than passive speakers I’ve heard that cost even more. In the rarefied price point that they occupy, Bang and Olufsen’s flagship speakers actually strike me as a bargain, as outrageous as that may sound when discussing $80,000 speakers. But, that’s exactly how good they are. Respect.”
soundstageglobal.com: “what I heard from the pair at CES 2016 absolutely blew me away — the way the pair imaged, coupled with the fullness, richness, and presence exhibited, had me talking about them for the rest of the day. Now I feel a little foolish for at first thinking they were a stupid design. Don’t make the same mistake — hear a pair of 90s if you can.”
bloomberg.com: “We got a brief demo and the sound is incredible.”
wired.com: “The soundstage is breathtaking, the low end is positively massive. Possibly the best speakers I’ve ever heard. Possibly the very speakers Crom has in his throne room in Valhalla.”
highdefdigest.com: “Having two of these exquisite pieces focused on me made for a smooth, powerful sound that will likely standout in my memory for the rest of my life. For those who can indulge, I strongly advise doing so.”
From the early press events
“So how did the BeoLab 90 make us feel? When we closed our eyes in Bang & Olufsen’s special listening room, the pair of master reference speakers (#2 and #3 ever made)—along with the room—seemed to vanish the instant a song played. We weren’t listening to sound emanating from two specific points; instead, the Weeknd was singing his heart out right in front of us. Benny Goodman’s band performed an intimate set, and you could picture where each musician was sitting. The BeoLab 90’s ability to create such a lifelike three-dimensional sound stage is unparalleled when you’re sitting in the sweet spot. It certainly brings up the question of whether a speaker can be “too” good for the music—some now-classic albums weren’t necessarily well-recorded and mastered (think of when the Rolling Stones turned the basement of a rented French mansion into a makeshift studio slash drug den). But when all the variables align perfectly, the music engulfs listeners entirely and hits the guts. The result of such incredible technology and engineering happens to be a very visceral human experience.”
“Die Abbildung war phänomenal, jedes Instrument der gewählten Musik nahm ganz selbstverständlich den für sich bestimmten Platz im Raum ein, jedes Element war von Anfang bis Ende verfolg- und erlebbar. Aber nicht nur die Ortung verblüffte, auch die Detailgenauigkeit, mit der selbst kleinste Feinheiten bis zum erkälteten Backgroundsänger aufgedeckt wurde, sucht ihresgleichen.”
– modernhifi.de
“Vi kan bevidne, at effekten er besnærende. Højttalerne spiller sammen med lytterummet på en måde, vi ikke har oplevet før. Personligt har jeg aldrig hørt et mere holografisk realistisk lydbillede, hverken i eller uden for sweet spot. BeoLab 90 er også en fuldblods, fullrange-højttaler, der ikke overlader noget til tilfældighederne.”
– lydogbillede.dk
“I found that the size of the soundstage was consistently proportional to the size of the ensemble and the recording. I found that the bass was very well extended, taut, and satisfying. Most of all, I was impressed by the prototypes’ reproduction of detail throughout the audio band, and the uniformity of that quality across the soundstage.”
– Kalman Rubinson, Stereophile magazine (print version, October, 2015)
“Wohl noch nie haben Lautsprecher die musikali schen Akteure so scharf ins Wohnzimmer projiziert. Ganz gleich, ob grosse Orchester oder kleine Jazz-Formationen – jedes ein zelne Instrument hat seinen exakten Platz im virtuellen Raum, der auch seine Tiefen dimension verblüffend genau zu erkennen gibt: Der Hörer kann zum Beispiel fast in Zentimetern abzählen, wie weit das Schlag zeug hinter dem Kontrabass placiert ist. Dass der Beolab 90 auch für schwärzeste BassTiefe, überbordende Dynamik und feinen, luftigen Obertonglanz steht, müssen TestHörer der Vollständigkeit halber natür lich ebenfalls zu Protokoll geben, aber das eigentlich Spektakuläre des Lautsprechers ist tatsächlich seine überragende räumliche Abbildung.”
– NZZ am Sonntag 18. Oktober 2015
diyaudio.com: “The Beolab 90 is a BEAST; I’m surprised Bang & Olufsen wasn’t kicked out of CES. I never even got close to the SPL limits of my Summas, but if the Beolab 90 had a limit, I couldn’t tell what it was. B&O cranked it up for a couple of tracks, and you could FEEL the bass. … The sound is clean and dynamic. The soundstage is whatever you give it; give it a good recording and the soundstage is pinpoint and huge, give it a crummy recording and it’s crummy. … If you couldn’t tell yet, this is the best speaker I’ve ever heard, bar none. In fact, I feel a little silly lumping it in with other loudspeakers.”
beoworld.org: I have heard a lot of powerful speakers, veeeery expensive speakers, crazy speakers and well, very much different setups. But the Beolab90 blew my mind! … The power in them, the presence of all the tones, the clarity of the sound, the smoothness, the details…. I could go on for ever. It was like I had smooth whipped butter made out of diamonds inside my ears. I will probably never again, or at least for sure not in a long time hear a speaker like this again. I will surely hear the BL90 again, but I doubt something else will beat this. It could very well be the best speaker ever made. Simple as that. Mind you, that they had only the basic software in them, so they are just getting better.”
This shows the relationship between the voltage applied to the terminals of a loudspeaker drivers (shown on the oscilloscope) and the excursion of the driver.
The frequency of the sine wave driving the system ranges from 1 Hz to 6 Hz, so we stay below the resonance frequency of the driver.
The jump in level as the frequency is increased is caused by the low frequency roll-off of the DAC that I’m using to send the signal to the amplifier. Its manufacturer wasn’t expecting anyone to use it at 1 Hz…
In the last posting I made, I did the typical over-simplification and implied that the movement of a loudspeaker diaphragm is “pistonic” (meaning that the whole diaphragm moves as one solid, stiff structure).
In real life, this is not true. I’ll write more about this in a future posting, but for now, I made an animation to show a couple of examples of an exaggerated real life… There’ll be an explanation of this later.
Once-upon-a-time, I wrote an article in this series about how a loudspeaker driver is made and (to some extent) how it works. Just recently, a reader asked a question related not only to this topic, but specifically to the BeoLab 90. Teddy wrote:
I am very curious as to why a driver like a Scanspeak Illuminator can reproduce so much more detail of the original signal when the fundamental design principles are just like less expensive drivers. I guess my question is how is a driver with superior detail retrieval designed and constructed? Also, what other benefits do you see when working with high end drivers?
I’m not sure that I can answer this question directly – but, in thinking about an answer, I realised that it might be interesting to talk about one reason why one loudspeaker driver is chosen over another in a given application or project.
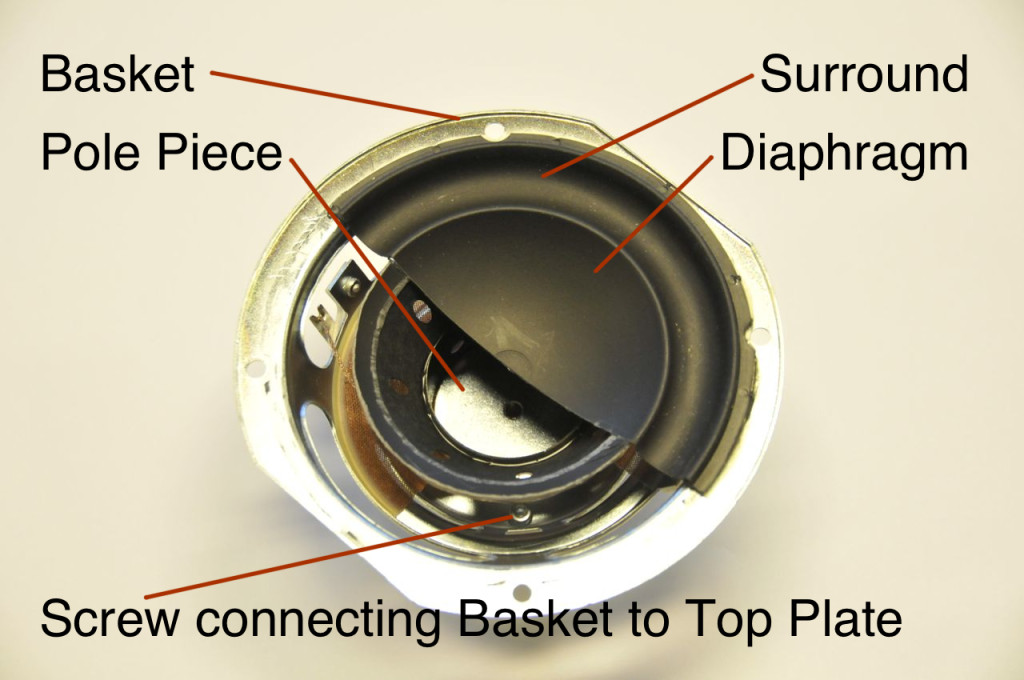
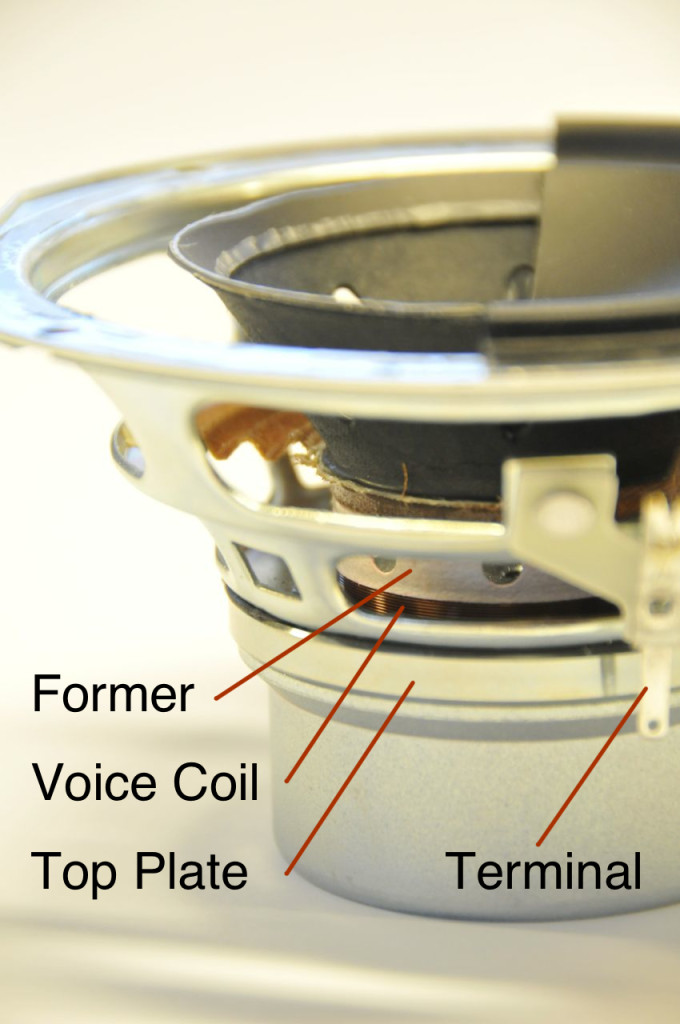
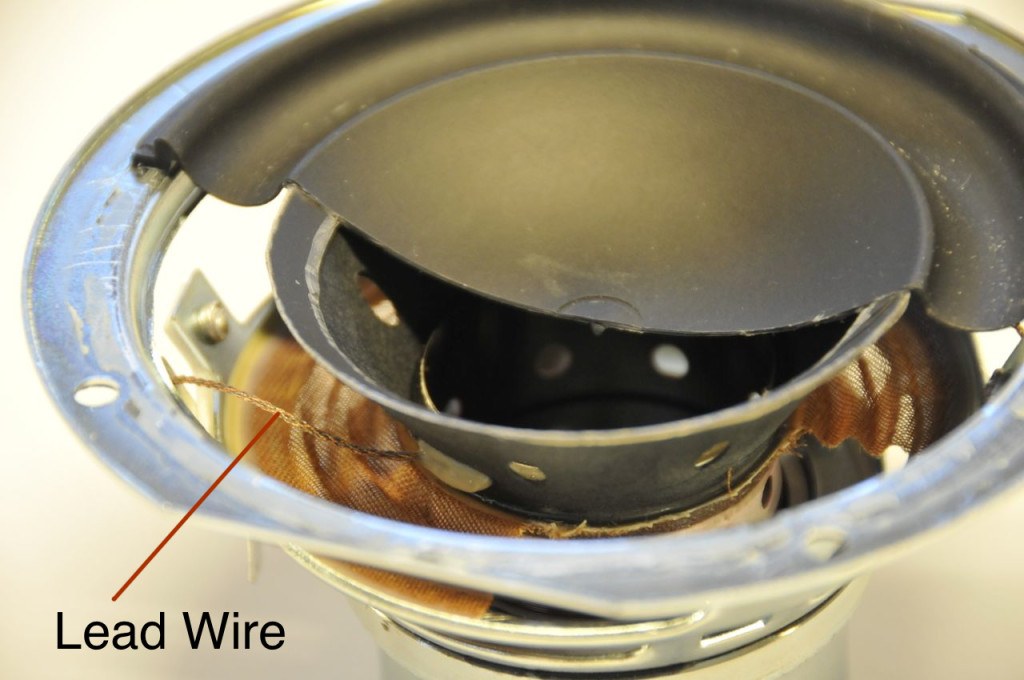
A quick background sidebar: a moving coil dynamic loudspeaker driver is a device that converts an electrical signal into mechanical movement. A voltage is applied to the terminals which causes current to flow through the voice coil (which is wrapped around a tube called a “former” that is attached to the “diaphragm” or “cone” – see Figures 1, 2, 3, and 4, below). That current generates a magnetic field around the wire – and since the coil is sitting in the magnetic field of a permanent magnetic, it wants to move. Depending on the direction of the current, the voice coil will either push outwards or pull inwards resulting in some excursion of the voice coil, former and diaphragm (those parts are all glued together). The whole thing doesn’t fly off because it’s held back by the loudspeaker’s “suspension”. The suspension is comprised of two things – the “surround” (usually a rubber ring that connects the edge of the diaphragm to the top of the basket – the metal frame that supports the whole assembly) and the “spider” (a ring of stretchy fabric that connects the former to the basket). The reason there are two components to the suspension is to ensure that, when the diaphragm moves in and out, it doesn’t rock from side to side. If you want a more complete version of this story, read this article.
Figure 1: A Beolab 3 woofer, showing some of the components.
Figure 2: A Beolab 3 woofer, showing some more of the components.
Figure 3: A BeoLab 3 woofer, showing some more of the components. The spider can also be seen there, but it’s not labeled – it’s the reddish-brown corrugated mesh.
When building any loudspeaker, you have to make some decisions about which driver to use. Lots of factors come into this decision – frequency range, maximum sound pressure level (vs. frequency), directivity (vs. frequency), size, sensitivity, cost, and many more things are weighed in order to make the most appropriate choice for the product. (If you’re making a passive loudspeaker, then the frequency response of the driver is important – but if you’re making an active loudspeaker, particularly one that is DSP-based, this is less of a concern, since it can be fixed (more or less…) in the processing.) One of the more significant issues in this list that an acoustical engineer worries about is the nonlinear distortion characteristics of the driver. (This is a big concern with a DSP-based active loudspeaker because non-linear distortion cannot be fixed in the processing.) If the movement of the driver’s diaphragm isn’t the same shape as the electrical signal that you put into it (for example, if you apply a nice smooth electrical sine wave at the speaker terminals, but the diaphragm moves in a jerky square wave fashion, then the output of the speaker isn’t the same as the input) then the signal has been distorted. There are different types of distortion, so we have to be a little more specific.
Linear distortion is what you have when the change to the signal can be “undone”. For example, if you add bass to a signal, then you’ve distorted it (the output of the bass boost is not the same as the input – but that’s the point). However, if you remove bass from the result, you can (in theory) get back what you started with.
Non-linear distortion is what you have when the change to the signal cannot be undone. If you put in a sine wave and the system clips (“chops off”) the top of it, there’s no way of regaining the nice smooth wave that you started with, because there’s no way of knowing what was there before the signal was chopped off.
Non-linear distortion can be generally broken into two general headings: harmonic distortion (sometimes abbreviated THD for Total Harmonic Distortion) and intermodulation distortion (or IMD). Harmonic distortion happens when you put in a signal with one frequency (say, a sinusoidal wave at 1 kHz) and you get out energy at other frequencies (that are multiples of the frequency of the input signal) as well (say, 2kHz, 3 kHz, 4 kHz, and so on…). Intermodulation distortion occurs when you put in more than one frequency (say, 900 Hz and 1000 Hz simultaneously) and you get out other frequencies that are usually mathematically related to the input (typically the sum and difference of multiples of the input frequencies – so, in our example, 1900 Hz (900+1000), 100 Hz (or 1000-900), 2900 Hz (2*1000+900), 1100 Hz (2*1000-900) and lots more…)
Another sidebar: These differences in distortion means that when you say “the signal sounds distorted” – the statement is about as useful as saying “the signal sounds different”. This is even true if you measure the distortion of a system and specify it with a number. See this posting and this posting for a more thorough discussion of this problem…
Back to our loudspeaker: in an ideal world, a loudspeaker driver’s movement would be an exact “replica” (more like an analogy) of the input signal. Sadly, this is never true. Never.
So, we start by accepting the knowledge that a loudspeaker driver is imperfect – and therefore it will impose some harmonic distortion and some intermodulation distortion on the signal. The next question is “why?” and “how can we minimise it?”
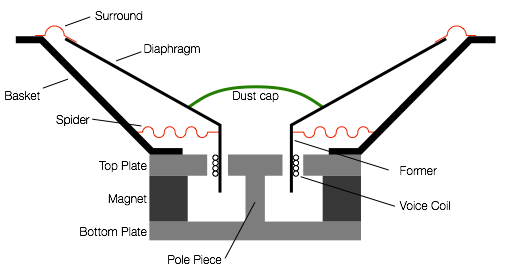
In order to talk about that, let’s take a driver and cut it in half. This is shown in Figure 4.
Figure 4: A cross section of a typical moving coil dynamic loudspeaker driver. The diaphragm is shown at the rest position, with an excursion of 0 mm. If you want to see this in 3D, check out this article.
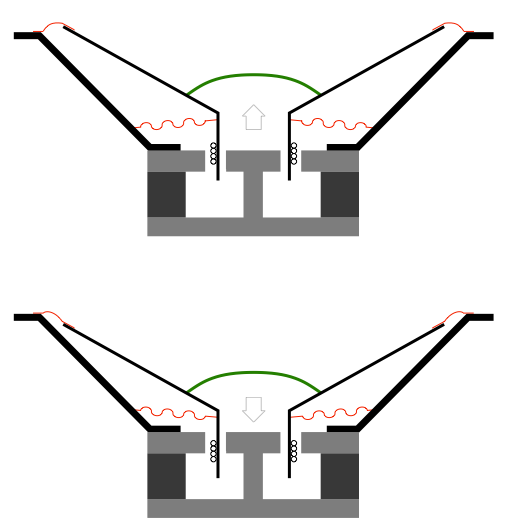
There are some moving parts of the loudspeaker driver. These are the diaphragm and dust cap, the former and the voice coil. these are all glued together and move as one part (hopefully…). When they move, the suspension (the surround and the spider) are stretched in one direction or the other. This can be seen in Figure 5.
Figure 5: The cross-section of a typical moving coil dynamic loudspeaker. The top drawing shows the diaphragm used outwards (a positive excursion). The bottom drawing shows the diaphragm pulled inwards (a negative excursion).
Now, let’s pretend that the movement of the diaphragm (and the dust cap, former, and voice coil) is caused by you (instead of being moved by the voice coil) – you’re the one pushing and pulling the moving parts. When the diaphragm is at the rest position, it’s easy to move. However, as you push it further and further out, it becomes harder and harder to move, since the suspension is stretching more and more. (This is just like an elastic band – stretching it a little bit is easy, stretching it a lot is hard.) If you’re pulling the driver inwards, then it’s the same – the father you get from the rest position (the greater the excursion) the harder it is to move.
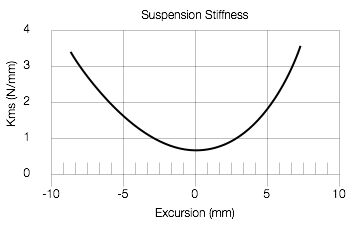
This behaviour is called the stiffness of the suspension (although it is also called the compliance – which is how not-stiff it is…). We can measure the suspension stiffness and plot it on a graph, relative to how far away the diaphragm is from the rest position (the excursion). An example of this is shown in Figure 6. (Note that Figure 6 is not the actual measurement of a real driver – I just drew a graph to illustrate the concept.)
Figure 6: An example of a stiffness curve of the driver’s suspension.
There are two things to notice in the graph in Figure 6. The first is that, as the excursion of the diaphragm moves away from the rest position (either inwards or outwards) the suspension gets stiffer (or harder to move). This means that you need less force to move the diaphragm from 0 mm to 1 mm than you do from 5 mm to 6 mm. the second thing is to notice that the curve is not symmetrical. For example, when the diaphragm has moved outwards by 5 mm, the suspension is stiffer than it is if you move it inwards by 5 mm.
Both of these things will be important later.
Now let’s consider what’s really doing the pushing and pulling. As I described above, when we apply a voltage to the terminals of the voice coil, a current runs through it and it turns into an electromagnet with a magnetic field around it. If the current goes in one direction, one side of the coil is north and the other is south. If we reverse the current direction, we flip the polarity of the electromagnet. The voice coil is already sitting inside the magnetic field of a permanent magnet, so when it gets its own magnetic field it will try to move in one direction or the other, depending on which end is north and which is south (which are dependent on the direction of the current which is dependent on which loudspeaker terminal has the positive voltage and which has the negative.)
The bigger the difference in voltage we apply at the terminals, the greater the current through the voice coil, and the stronger the electromagnet. This means that we will be applying more force to move the voice coil (and the former, the diaphragm, and the dust cap) outwards or inwards.
However, there’s a problem in that last statement. We only have the force to move the voice coil if there’s a magnetic field (from the permanent magnet) to push against. If there were no permanent magnet, there would not be anything for the electromagnet (the voice coil) to push against, so it wouldn’t move.
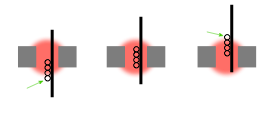
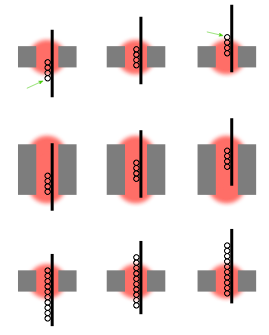
But look again – closely – at Figures 5 and 6. When the voice coil is at rest, it’s sitting in the “gap” which is where the magnetic field is strongest. However, as it moves inwards or outwards, it also moves out of the gap, and therefore out of the magnetic field. This is illustrated below in the three drawings in Figure 7.
Figure 7: A cross section of the voice coil (the black circles) on the former (the black vertical line) sitting in the magnetic field (in red) in the gap of the loudspeaker driver (between the two grey rectangles – the top plate and pole piece).
Look at the three drawings in Figure 7 which show that, as the coil moves inwards or outwards, part of the coil moves out of the magnetic field (green arrows), so there’s nothing for it to push against. This means that the bigger the excursion of the diaphragm, the less force with which you have to push (or pull) it. This force factor (abbreviated Bl – but we won’t talk about why…) is a product of the strength of the magnetic field, the length of wire in the coil. That value is multiplied by the amount of current flowing through the coil to find the force delivered by the system. However, as we can see above, is also dependent on the position of the voice coil relative to the gap. that change in force factor can be measured for the driver as a function of its excursion. An example of this is shown in Figure 8, below. (Note that Figure 8 is not the actual measurement of a real driver – I just drew a graph to illustrate the concept.)
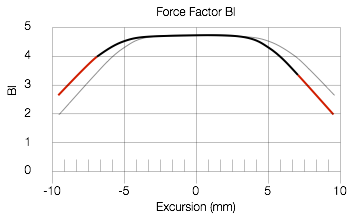
Figure 8: An example of an undesirable Bl curve. In this example you can see that, as soon as the driver moves out of the rest position, you increasingly lose force factor.
Now, hopefully, you will be asking yourself a very important question. If you look at Figure 6, you can see that, as the excursion of the driver increases, the harder it is to move, so we should have more force factor available to move it. However, Figure 8 shows us that as the excursion of the driver increases we lose force factor… This is something like losing horsepower in your car’s engine every time you go up a hill…
Sadly, although the graphs I drew in Figures 6 and 8 are just invented curves that I drew, they’re not unusual to see… What’s the effect? Basically, it means that you don’t have the ability to push the driver as far out (or in) as you would like, so the peaks (and troughs) in your waveform will be flattened. If either the stiffness or the force factor curves (or both) are asymmetrical, then the flattening will be different on the outwards excursion than the inwards (in other words, the peaks will be squashed differently than the troughs). The total result is that the driver distorts the signals – and you’ll get both harmonic distortion and intermodulation distortion. The less flat the stiffness and/or force factor curves, the more distortion you’ll get. In addition, if you lose force factor with excursion, then when you have an impulsive sound (like a kick drum, for example), you can start moving the diaphragm outwards (because you have force factor at the rest position to do the throwing) but you don’t have the force factor to control its return – so you throw the speaker out, and hope that it comes back instead of pulling it back… This is another form of distortion – but it’s a time-based distortion that might look like “ringing” for example.
But what is it that you want?
In a perfect world, the stiffness of the suspension would be the same, regardless of the excursion of the driver – in other words, it would be a horizontal line instead of the curve in Figure 6. Also, in a perfect world, you would not lose force factor with excursion. In other words, you could always have the same amount of control over the driver, regardless of how far in or out it is.
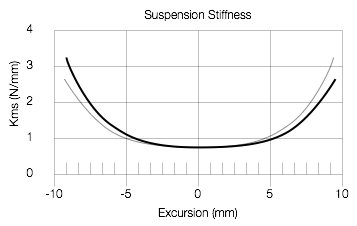
In order to flatten the stiffness, we have to look at the behaviour of the surround and the spider (if we’re ignoring the effect of the air behind the driver in the loudspeaker enclosure, which, in a real world, cannot be ignored… but let’s stay out of the real world for the purposes of this discussion). One simple method of flattening the stiffness vs. excursion is to make the driver suspension to allow for a much bigger excursion than you expect, for example. If we look at the measured stiffness of the Scan-Speak Illuminator 12MU/4731T00 (the midrange driver in the BeoLab 90), it looks like the graph in Figure 9. (I traced this using the plot in this article.)
Figure 9: The stiffness curve of the suspension of the BeoLab 90’s midrange driver. The stiffness stays fairly constant until the driver has moved about 5 mm inwards or outwards from the rest position.
There are two things to notice about this stiffness curve. The first is how flat it is around the rest position. The second is that it’s very symmetrical, particularly around the rest position. (This is the reason the mirror image of the stiffness curve is plotted (in grey) – so that you can see the symmetry of the curve.) So, one reason we chose the Scanspeak Illuminator midrange for the Beolab 90 was for this stiffness curve. The “so what?” of this is that the distortion of the driver is lower than with a typical driver.
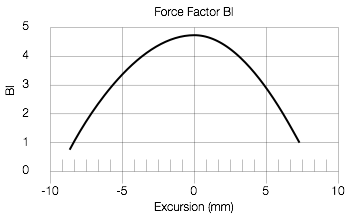
Next, we look at the force factor or Bl curve. The Illuminator midrange has an unusually flat Bl curve, as can be seen in Figure 10 (also copied from the pdf file lined above). Looking at Figures 9 and 10 together, you can see that, if you stay within an excursion of ± 5 mm or so, both the stiffness and the Bl curves are flat – so the distortion imposed on the audio signal by the driver is very low. Of course, we push the driver further than 5 mm, but even then, the two curves show us that the driver “behaves” better than most…
Figure 10: The Bl force factor curve of the midrange driver of the Beolab 90. The amount of force (and therefore the control of the driver) stays fairly constant until the excursion of the driver is more than 5 mm away from the rest position.
How is such a flat Bl curve achieved? Take a look at Figure 11, below.
Figure 11: Three different options for the design of a voice coil relative to the magnetic gap and their behaviour with respect to excursion. The top three drawings show a typical design. The middle three show an underhung design. The bottom three show an overhung design. See the text for descriptions of what this means.
The top three drawings in Figure 11 show the same situation as was shown in Figure 7. As you can see there, as the voice coil moves, it moves out of the magnetic field and we lose force. However, look at the middle three drawings. In this case, the magnetic field (in red) is much bigger than the coil. So, even though the coil moves inwards and outwards, none of it leaves the magnetic field. This is called an “underhung” design – and the result is a flattened Bl curve. We don’t lose force factor because the coil is always in the gap and therefore doesn’t see a change in the magnetic field.
Another way to achieve the same effect is to make the voice coil much bigger than the magnetic field – an “overhung” design. So, the same amount of it is always in the gap.
There are advantages and disadvantages to each of these options. In an underhung design, you have a big magnet, and therefore the driver is heavy – so it’s not typically seen in automotive loudspeakers. The overhung design has a heavy voice coil which is harder to move, so you don’t usually see it in drivers for higher-frequency applications… However, if your ONLY concern is the Bl curve, either design will improve your performance.
The Scanspeak Illuminator uses the underhung design, which is is not hard to figure out just by looking at the photos of it in Figures 12 and 13.
Figure 12: A Scanspeak Illuminator midrange used in the Beolab 90. It’s upside down here, but its easy to see the relatively large size of the magnetic housing in which the voice coil moves.
Figure 13: The drivers of the Beolab 90 in their correct locations and orientations. This is a physical representation of the information given to the visual designers of the loudspeaker.
Wrapping up
The stiffness and Bl curves of the Illuminator midrange and the resulting low distortion are just one aspect of the driver that contributed to its choice for the Beolab 90. As I said at the start of the article, there are many, many factors that have to be considered when choosing a driver for a loudspeaker. It is also important to remember that a driver that is a good choice for one loudspeaker does not necessarily mean that it’s a good choice for another loudspeaker. A gearbox that’s perfect for a racing motorcycle is not necessarily going to work well on an 18-wheeler truck. A racing bicycle can go fast partly due to its tires – however, if you put the same tires on a Ferrari, you won’t get very far… Every individual component of any loudspeaker has to be chosen with all of the other components in mind to build an optimal system.
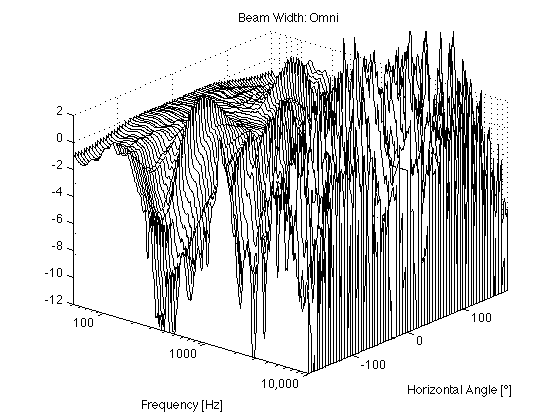
In a past article, I tried to come up with an intuitive way of representing the beam width (or “directivity” – if you’re a geek) of the BeoLab 90. I realised after posting, that there is another way to do this which is used in loudspeaker reviews in some magazines (mostly because it’s the way directivity is plotted by MLSSA). So, I’ve taken the same data as before, and re-plotted it using a “waterfall” function in Matlab. It’s just a different way of looking at the same information – but it might be helpful.
If you’re curious about the details regarding the data itself, this is described here.
Figure 1: BeoLab 90 directivity vs. frequency as a “normal” three-way loudspeaker with the Beam Control disabled. (Note that this is not possible in a production model.)
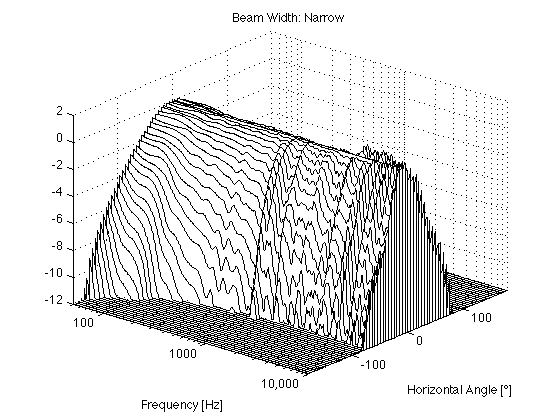
Figure 2: Directivity vs. frequency of BeoLab 90 in Narrow mode
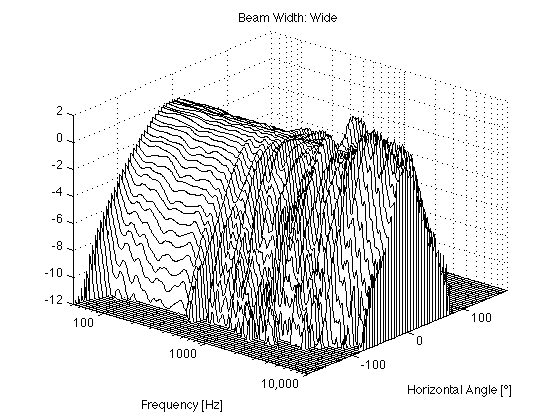
Figure 3: Directivity vs. frequency of BeoLab 90 in Wide mode. Compare this to the BeoLab 5 plot, below. As can be seen here, the low frequency directivity (or beam width) is controlled to be the same as the mid and high frequency bands.
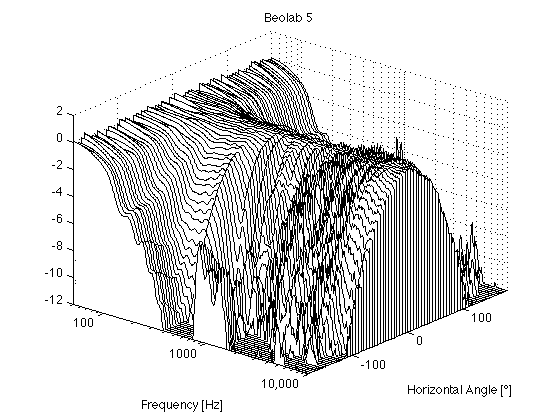
Figure 4: BeoLab 5 directivity vs. frequency. As can be seen here, the Acoustic Lens ensures a constant directivity (meaning the same beam width at all frequencies) in the high end. However, the low frequency band is omnidirectional.
Figure 5: Directivity vs. frequency of BeoLab 90 in Omni mode