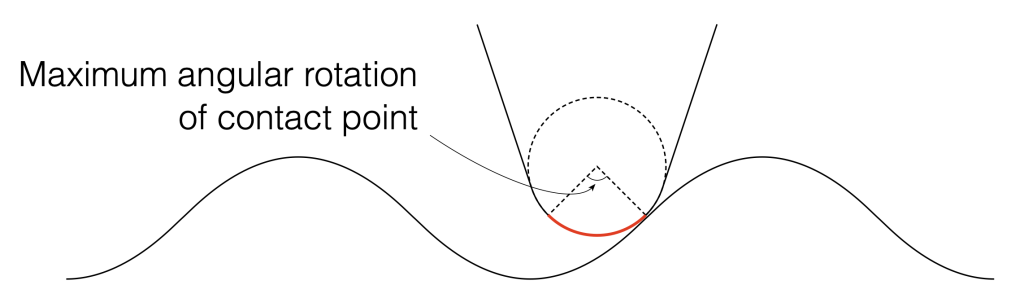
In the last posting, I showed a scale drawing of a 15 µm radius needle on a 1 kHz sine tone with a modulation velocity of 50 mm/s (peak) on the inside groove of a record. Looking at this, we could see that the maximum angular rotation of the contact point was about 13º away from vertical, so the total range of angular rotation of that point would be about 27º.
I also mentioned that, because vinyl is mastered so that the signal on the groove wall has a constant velocity from about 1 kHz and upwards, then that range will not change for that frequency band. Below 1 kHz, because the mastering is typically ensuring a constant amplitude on the groove wall, then the range decreases with frequency.
We can do the math to find out exactly what the angular rotation the contact point is for a given modulation velocity and groove speed.
Figure 1: A scale drawing of a 15 µm radius needle on a 1 kHz sine tone with a modulation velocity of 50 mm/s (peak) on the inside groove of a record. These two points are the two extremes of the angular rotation of the contact point.
Looking at Figure 1, the rotation is ±13.4º away from vertical on the maximum; so the total range is 26.8º. We convert this to a time modulation by converting that angular range to a distance, and dividing by the groove speed at the location of the needle on the record.
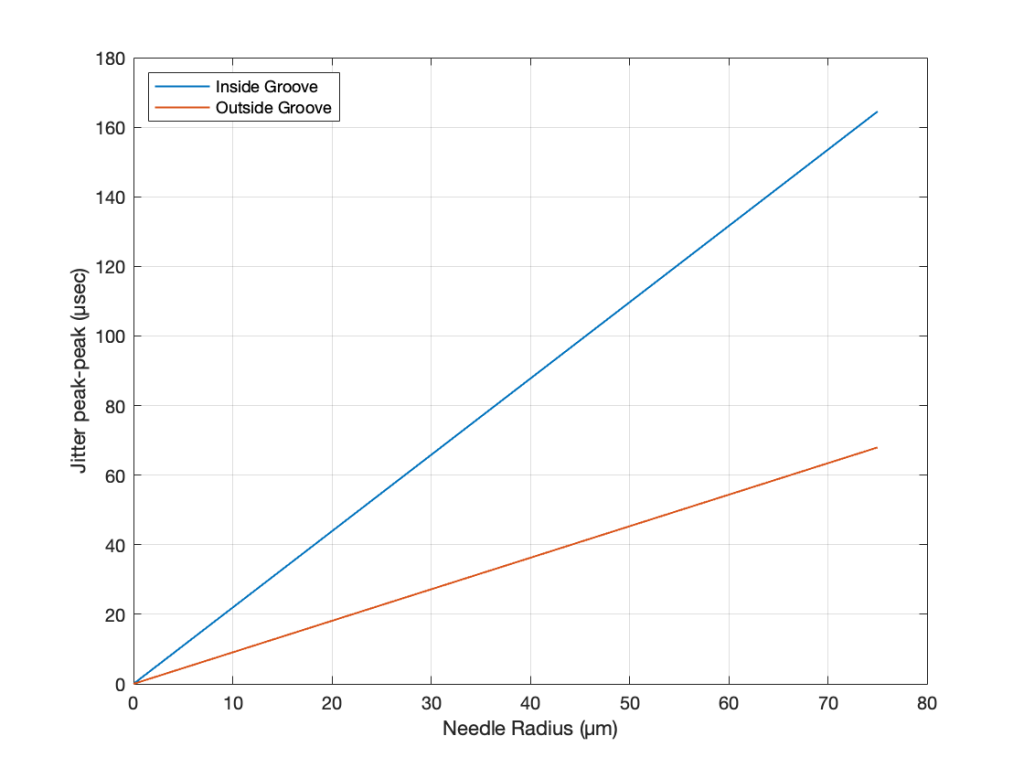
If we repeat that procedure for a range of needle radii from 0 µm to 75 µm for the best-case (the outside groove) and the worst-case (the inside groove), we get the results shown in Figure 2.
Figure 2. The peak-to-peak equivalent “jitter” values of the inside and outside grooves for a range of needle radii.
Back in Part II of what is turning out to be a series of postings on this topic, I wrote
If this were a digital system instead of an analogue one, we would be describing this as ‘signal-dependent jitter’, since it is a time modulation that is dependent on the slope of the signal. So, when someone complains about jitter as being one of the problems with digital audio, you can remind them that vinyl also suffers from the same basic problem…
As I was walking the dog on another night, I got to thinking whether it would be possible to compare this time distortion to the jitter specifications of a digital audio device. In other words, is it possible to use the same numbers to express both time distortions? That question led me here…
Remember that the effect we’re talking about is caused by the fact that the point of contact between the playback needle and the surface of the vinyl is moving, depending on the radius of the needle’s curvature and the slope of the groove wall modulation. Unless you buy a contact line needle, then you’ll see that the radius of its curvature is specified in µm – typically something between about 5 µm and 15 µm, depending on the pickup.
Now let’s do some math. The information and equations for these calculations can be found here.
We’ll start with a record that is spinning at 33 1/3 RPM. This means that it makes 0.556 revolutions per second.
The Groove Speed relative to the needle is dependent on the rotation speed and the radius – the distance from the centre of the record to the position of the needle. On a 12″ LP, the groove speed at the outside groove where the record starts is 509.8 mm/sec. At the inside groove at the end of the record, it’s 210.6 mm/sec.
Let’s assume that the angular rotation of the contact point (shown in Figure 1) is 90º. This is not based on any sense of scale – I just picked a nice number.
Figure 1. Artists rendition of the range of the point of contact between the surface of the vinyl and the pickup needle.
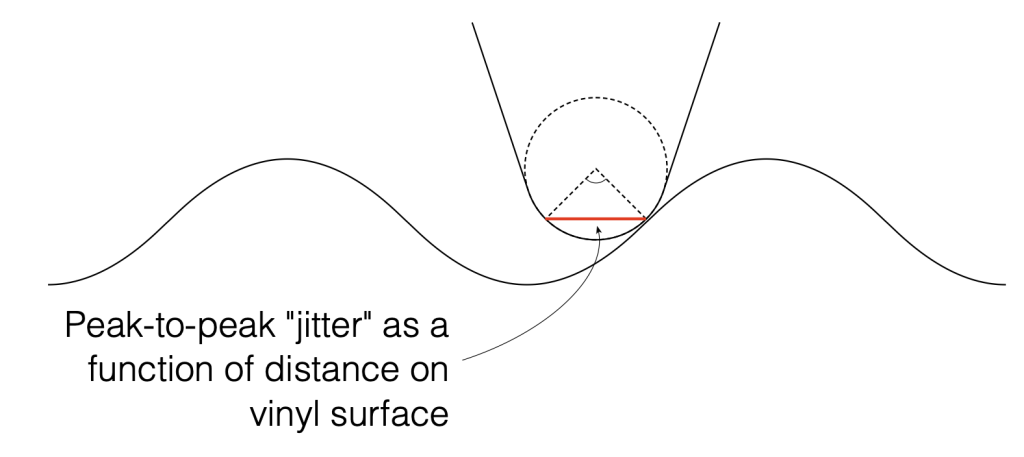
We can convert that angular shift into a shift in distance on the surface of the vinyl by finding the distance between the two points on the surface, as shown below in Figure 2. Since you might want to choose an angular rotation that is not 90º, you can do this with the following equation:
2 * sin(AngularRotation / 2) * radius
So, for example, for a needle with a radius of 10 µm and a total angular rotation of 90º, the distance will be:
2 * sin(90/2) * 10 = 14.1 µm
Figure 2. The angular range from Figure 1 converted to a linear distance on the vinyl’s surface.
We can then convert the “jitter” as a distance to a jitter in time by dividing it by the distance travelled by the needle each second – the groove speed in µm per second. Since that groove speed is dependent on where the needle is on the record, we’ll calculate it as best-case and a worst-case values: at the outside and the inside of the record.
Jitter Distance / Groove Speed = Jitter in time
For example, at the inside of the record where the jitter is worst (because the wavelength is shortest and therefore the maximum slope is highest), the groove speed is about 210.6 mm/sec or 210600 µm/sec.
Then the question is “what kind of jitter distance should we really expect?”
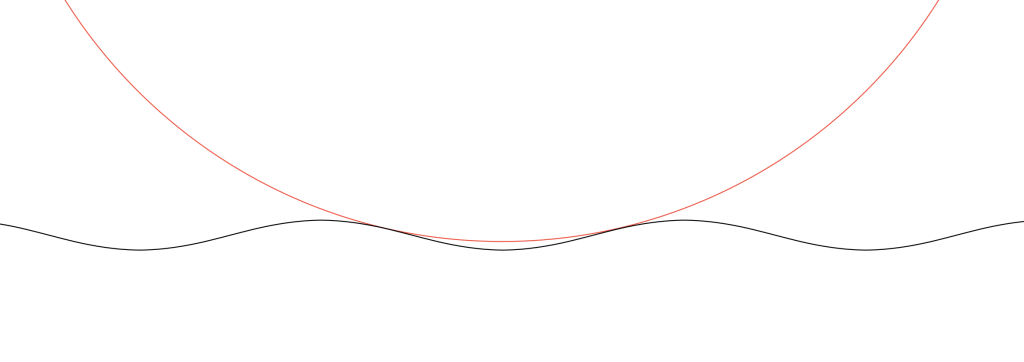
Figure 3. Scale drawing of a needle on a record.
Looking at Figure 3 which shows a scale drawing of a 15 µm radius needle on a 1 kHz tone with a modulation velocity of 50 mm/s (peak) on the inside groove of a record, we can see that the angular rotation at the highest (negative) slope is about 13.4º. This makes the total range about 27º, and therefore the jitter distance is about 7.0 µm.
If we have a 27º angular rotation on a 15 µm radius needle, then the jitter will be
7.0 / 210600 = 0.0000332 or 33.2 µsec peak-to-peak
Of course, as the radius of the needle decreases, the angular rotation also decreases, and therefore the amount of “jitter” drops. When the radius = 0, then the jitter = 0.
It’s also important to note that the jitter will be less at the outside groove of the record, since the wavelength is longer, and therefore the slope of the groove is lower, which also reduces the angular rotation of the contact point.
Since the groove on records are typically equalised to ensure that you have a (roughly) constant velocity above 1 kHz and a constant amplitude below, then this means that the maximum slope of the signal and therefore the range of angular rotation of the contact point will be (roughly) the same from 1 kHz to 20 kHz. As the frequency of the signal descended from 1 kHz and downwards, the amplitude remains (roughly) the same, so the velocity decreases, and therefore the range of the angular rotation of the contact point does as well.
In other words, the amount of jitter is 0 at 0 Hz, and increases with frequency until about 1 kHz, then it remains the same up to 20 kHz.
As one final thing: as I was drawing Figure 3, I also did a scale drawing of a 20 kHz signal with the same 50 mm/s modulation velocity and the same 15 µm radius needle. It’s shown in Figure 4.
Figure 4. Scale drawing of a needle on a record.
As you can see there, the needle’s 15 µm radius means that it can’t drop into the trough of the signal. So, that needle is far too big to play a CD-4 quad record (which can go all the way up to 45 kHz).
A question came to my desk this week from a customer who would like to connect a third-party streaming device to his Beolab 50s. He plans to use a USB-Audio connection and his question was “Should I control the volume of the audio signal in the streamer or in the Beolab 50s?” There are three different ways to configure these two options:
Control the volume in the streamer using its interface, and send a signal that has been volume-regulated to the Beolab 50s, which should then be set to have a start up default volume such that the maximum volume on the streamer results in a level that is as loud as the customer will ever want it to be. In order to do this, the Beolab 50s need to be set to ignore the volume information that is received on the USB-Audio connection.
Set the streamer to output an unregulated signal, and set the Beolab 50s to obey the volume information that is received on the USB-Audio connection, then use the streamer’s interface for the volume control (which would actually be happening inside the Beolab 50s).
Set the streamer to output an unregulated signal, and set the Beolab 50s to disobey the volume information that is received on the USB-Audio connection, then use the Beolab 50’s interface for the volume control (which would actually be happening inside the Beolab 50s).
Of course, one way to answer the question is “where do you want to control the volume?” For example, if it’s with a remote control for the Beolab 50s, then the answer is “use option #3”. If you’d prefer to use the streamer’s app, for example, then the answer is “use option #1 or #2”.
However, the question came to my desk because it was specifically about the technical performance of the audio signal. Which of these three options results in the highest audio “quality”? (I put the word “quality” in quotation marks because it is a loaded term, and might mean different things to different persons…)
The simplest answer without getting into any details is “it probably doesn’t matter“. However, that answer is based on a couple of assumptions that may or may not be wrong.
Hypothetically, the Beolab 50 can output an audio signal that peaks at about 122 dB SPL measured at 1 m in a free field, albeit not at all frequencies present at its output. (This is because there are some physical limitations of how far the woofers can move, which means that you can’t get 122 dB SPL at 20 Hz, for example.) The noise floor of the Beolab 50s is about 0 dB SPL measured in the same place (again, this is frequency-dependent). So, it has a total dynamic range at its output of about 122 dB.
The maximum output level is a result of a combination of the loudspeaker drivers, the amplifiers, and the power supply, however, these have all been chosen to reach their maximum outputs approximately simultaneously, so changing one of the three won’t make a big difference.
The noise floor is a result of the combination of the loudspeaker drivers’ sensitivities, the amplifiers’ noise floors, and the signal that feeds the amplifiers: the DAC outputs’ noise floors. For the purposes of this discussion, I’m sticking with a digital input, so we don’t need to worry about the noise floor of the ADC at the loudspeaker’s input.
If you have an audio signal at one of the digital inputs of the Beolab 50, and that signal is at its loudest possible level (for a sine wave, that’s 0 dB FS; or 0 dB relative to Full Scale). At Beolab 50’s maximum volume setting, this will produce a peak output level of 122 dB SPL (depending on the frequency as I mentioned above).
All digital inputs of the Beolab 50 accept at least a 24 bit word length. This means that the dynamic range of the digital input signal itself is about 6 * 24 – 3 = 141 dB. This in turn means that the hypothetical noise floor of a correctly-dithered 24-bit signal is 19 dB below the noise floor of the loudspeakers even at their maximum volume setting. (because 122 – 141 = -19)
In other words, if we assume that the streamer has a correctly-implemented gain function for its volume control, using TPDF dither implemented at the 24-bit level, then its noise floor will be 19 dB below the “natural” noise floor of the Beolab 50. Therefore, if the volume is controlled in the streamer, any artefacts will be masked by the 50s themselves.
On the other hand, the Beolab 50s volume control is done using a gain function that is performed in a 32-bit floating point calculation, which means that it has a dynamic range of 144 to 150 dB. (See this posting for an explanation and comparison of fixed point and floating point systems.) So the noise generated by the internal volume control will be somewhere between 22 and 26 dB below the “natural” noise floor of the Beolab 50.
So, (assuming my assumptions are correct) the noise floor that is produced by controlling the volume control in either the streamer or the Beolab 50s is FAR below the constant noise floor of the DAC / amplifiers.
In addition, the noise floors have roughly the same spectra (in other words, you don’t have pink noise in one case but white noise in the other; they’re all producing white noise). And since both are so far below, it really doesn’t matter. Arguing about whether the noise is 19 dB lower or 22 dB lower is a waste of good argument time, unless you paid for the four-and-a-half-hour argument instead of the five-minute one…
Important Notes
If the customer was asking about using the analogue input, then the answer MIGHT have been different.
Also, if my assumption about a 24-bit signal coming from the streamer, or that it has a correctly-implemented gain function for its volume control are incorrect, the this answer MIGHT be incorrect as well.
Once upon a time, I did a blog posting about why, when we test digital audio systems, we typically use a 997 Hz sine wave instead of a 1000 Hz tone.
The short version of this is the following:
Let’s say that I digitally create a (not-dithered) 1000 Hz sine wave at 0 dB FS in a 16-bit system running at 48 kHz. This means that every second, there are exactly 1000 cycles of the wave, and since there are 48,000 samples per second, this, in turn means that there is one cycle every 48 samples, so sample #49 is identical to sample #1.
So, we are only testing 48 of the possible 2^16 ( = 65,536) quantisation values, right?
Wrong. It’s worse than you think.
If we zoom in a little more, we can see that Sample #1 = 0 (because it’s a sine wave). Sample #25 is also equal to 0 (because 48,000 / 1,000 is a nice number that is divisible by 2).
Unfortunately, 48,000 / 1,000 is a nice number that is also divisible by 4. So what? This means that when the sine wave goes up from 0 to maximum, it hits exactly the same quantisation values as it does on the way from maximum back down to 0. For example, in the figure below, the values of the two samples shown in red are identical. This is true for all symmetrical points in the positive side and the negative side of the wave.
Jumping ahead, this means that, if we make a “perfect” 1 kHz sine wave at 48 kHz (regardless of how many bits in the system) we only test a total of 25 quantisation steps. 0, 12 positive steps, and 12 negative ones.
Not much of a test – we only hit 25 out of a possible 65,546 values in a 16-bit system (or 25 out of 16,777,216 possible values in a 24-bit system).
What if I wanted to make a signal that tested ALL possible quantisation values in an LPCM system? One way to do this is to simply make a linear ramp that goes from the lowest possible value up to the highest possible value, step by step, sample by sample. (of course, there are other ways, but it doesn’t matter… we’re just trying to hit every possible quantisation value…)
How long would it take to play that test signal?
First we convert the number of bits to the number of quantisation steps. This is done using the equation 2^bits. So, you get the following results
Number of Bits
Number of Quantisation Steps
16
65,536
24
16,777,216
32
4,294,967,296
If the value of each sample has a different quantisation value, and we play the file at the sampling rate then we can calculate the time it will take by dividing the number of quantisation steps by the sampling rate. This results in the following:
Sampling Rate (kHz)
16 Bits
24 Bits
32 Bits
44.1
1.5 seconds
6.4 minutes
27.1 hours
48
1.4 seconds
5.8 minutes
24.9 hours
88.2
0.7 seconds
3.2 minutes
13.5 hours
96
0.7 seconds
2.9 minutes
12.4 hours
176.4
0.4 seconds
1.6 minutes
6.8 hours
192
0.3 seconds
1.5 minutes
6.2 hours
352.8
0.2 seconds
47.6 seconds
3.4 hours
384
0.2 seconds
43.7 seconds
3.1 hours
705.6
0.1 seconds
23.8 seconds
1.7 hours
768
0.1 seconds
21.8 seconds
1.6 hours
So, the moral of the story is, if you’re testing the validity of a quantiser in a 32-bit fixed-point system, and you’re not able to do it off-line (meaning that you’re locked to a clock running at the correct sampling rate) you’d either (1) hope that it’s also a crazy-high sampling rate or (2) that you’re getting paid by the hour.
Why I am thinking about this?
I often get asked for my opinion about audio players; these days, network streamers especially, since they’re in style.
Let’s say, for example, that someone asked me to recommend a network streamer for use with their system. In order to recommend this, I need to measure it to make sure it behaves.
One of the tests I’m going to run is to ensure that every sample value on a file is accurately output from the device. Let’s also make it simple and say that the device has a digital output, and I only need to test 3 LPCM audio file formats (WAV, AIFF and FLAC – since those can be relied to give a bit-for-bit match from file to output). (We’ll also pretend that the digital output can support a 32-bit audio word…)
So, to run this test, I’m going to
create test files that I described above (checking every quantisation value at all three bit depths and all 10 sampling rates)
play them
record them
and then compare whether I have a bit-for-bit match from input (the original file) to the output
If you add up all the values in the table above for the 10 sampling rates and the three bit depths, then you get to a total of 4.2 DAYS of play time (playing audio constantly 24 hours a day) per file format.
So, say I wanted to test three file formats for all of the sampling rates and bit depths, then I’m looking at playing & recording 12.6 days of audio – and then I can start the analysis.
REALLY‽
Of course this is silly… I’m not going to test a 32-bit, 44.1 kHz file… In fact, if I don’t bother with the 32-bit values at all, then my time per file format drops from 4.2 days down to 23.7 minutes of play time, which is a lot more feasible, but less interesting if I’m getting paid by the hour.
However, it was fun to calculate – and it just goes to show how big a number 2^32 is…
In Part 1 of this series, I talked about how a binaural audio signal can (hypothetically, with HRTFs that match your personal ones) be used to simulate the sound of a source (like a loudspeaker, for example) in space. However, to work, you have to make sure that the left and right ears get completely isolated signals (using earphones, for example).
In Part 2, I showed how, with enough processing power, a large amount of luck (using HRTFs that match your personal ones PLUS the promise that you’re in exactly the correct location), and a room that has no walls, floor or ceiling, you can get a pair of loudspeakers to behave like a pair of headphones using crosstalk cancellation.
There’s not much left to do to create a virtual loudspeaker. All we need to do is to:
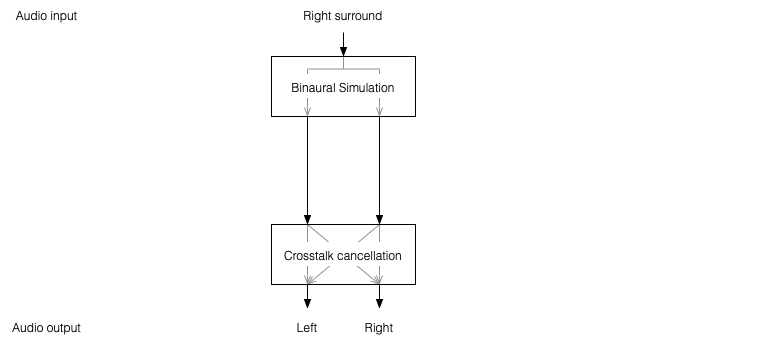
Take the signal that should be sent to a right surround loudspeaker (for example) and filter it using the HRTFs that correspond to a sound source in the location that this loudspeaker would be in. REMEMBER that this signal has to get to your two ears since you would have used your two ears to hear an actual loudspeaker in that location.
Send those two signals through a crosstalk cancellation processing system that causes your two loudspeakers to behave more like a pair of headphones.
Figure 1: A block diagram of the system described above.
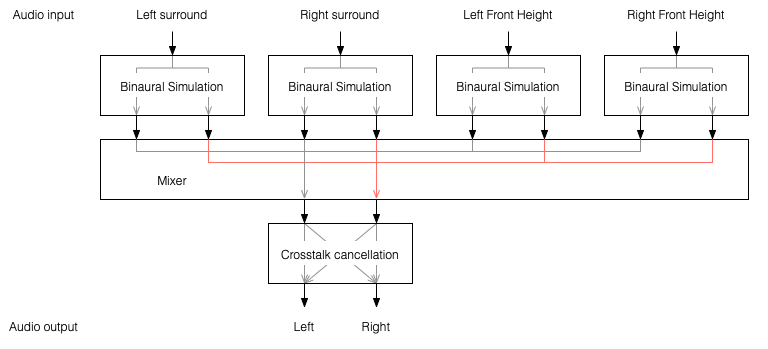
One nice thing about this system is that the crosstalk cancellation is only there to ensure that the actual loudspeakers behave more like headphones. So, if you want to create more virtual channels, you don’t need to duplicate the crosstalk cancellation processor. You only need to create the binaurally-processed versions of each input signal and mix those together before sending the total result to the crosstalk cancellation processor, as shown below.
Figure 2: You only need one crosstalk cancellation system for any number of virtual channels.
This is good because it saves on processing power.
So, there are some important things to realise after having read this series:
All “virtual” loudspeakers’ signals are actually produced by the left and right loudspeakers in the system. In the case of the Beosound Theatre, these are the Left and Right Front-firing outputs.
Any single virtual loudspeaker (for example, the Left Surround) requires BOTH output channels to produce sound.
If the delays (aka Speaker Distance) and gains (aka Speaker Levels) of the REAL outputs are incorrect at the listening position, then the crosstalk cancellation will not work and the virtual loudspeaker simulation system won’t work. How badly is doesn’t work depends on how wrong the delays and gains are.
The virtual loudspeaker effect will be experienced differently by different persons because it’s depending on how closely your actual personal HRTFs match those predicted in the processor. So, don’t get into fights with your friends on the sofa about where you hear the helicopter…
The listening room’s acoustical behaviour will also have an effect on the crosstalk cancellation. For example, strong early reflections will “infect” the signals at the listening position and may/will cause the cancellation to not work as well. So, the results will vary not only with changes in rooms but also speaker locations.
Finally, it’s worth nothing that, in the specific case of the Beosound Theatre, by setting the Speaker Distances and Speaker Levels for the Left and Right Front-firing outputs for your listening position, then you have automatically calibrated the virtual outputs. This is because the Speaker Distances and Speaker Levels are compensations for the ACTUAL outputs of the system, which are the ones producing the signal that simulate the virtual loudspeakers. This is the reason why the four virtual loudspeakers do not have individual Speaker Distances and Speaker Levels. If they did, they would have to be identical to the Left and Right Front-firing outputs’ values.
In Part 1, I talked at how a binaural recording is made, and I also mentioned that the spatial effects may or may not work well for you for a number of different reasons.
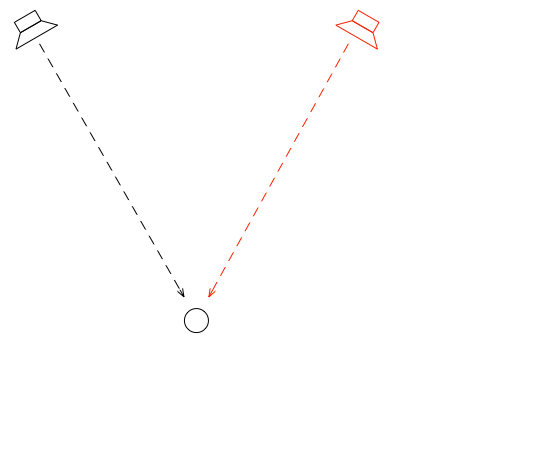
Let’s go back to the free field with a single “perfect” microphone to measure what’s happening, but this time, we’ll send sound out of two identical “perfect” loudspeakers. The distances from the loudspeakers to the microphone are identical. The only difference in this hypothetical world is that the two loudspeakers are in different positions (measuring as a rotational angle) as shown in Figure 1.
Figure 1: Two identical, “perfect” loudspeakers in a free field with a single “perfect” microphone.
In this example, because everything is perfect, and the space is a free field, then output of the microphone will be the sum of the outputs of the two loudspeakers. (In the same way that if your dog and your cat are both asking for dinner simultaneously, you’ll hear dog+cat and have to decide which is more annoying and therefore gets fed first…)
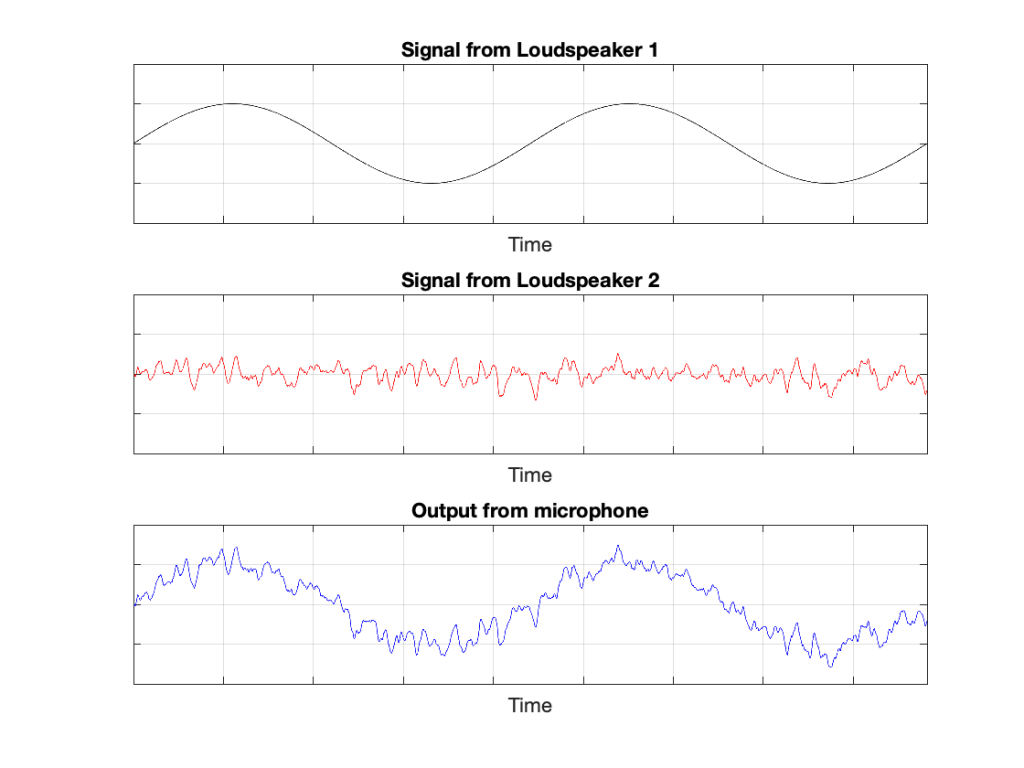
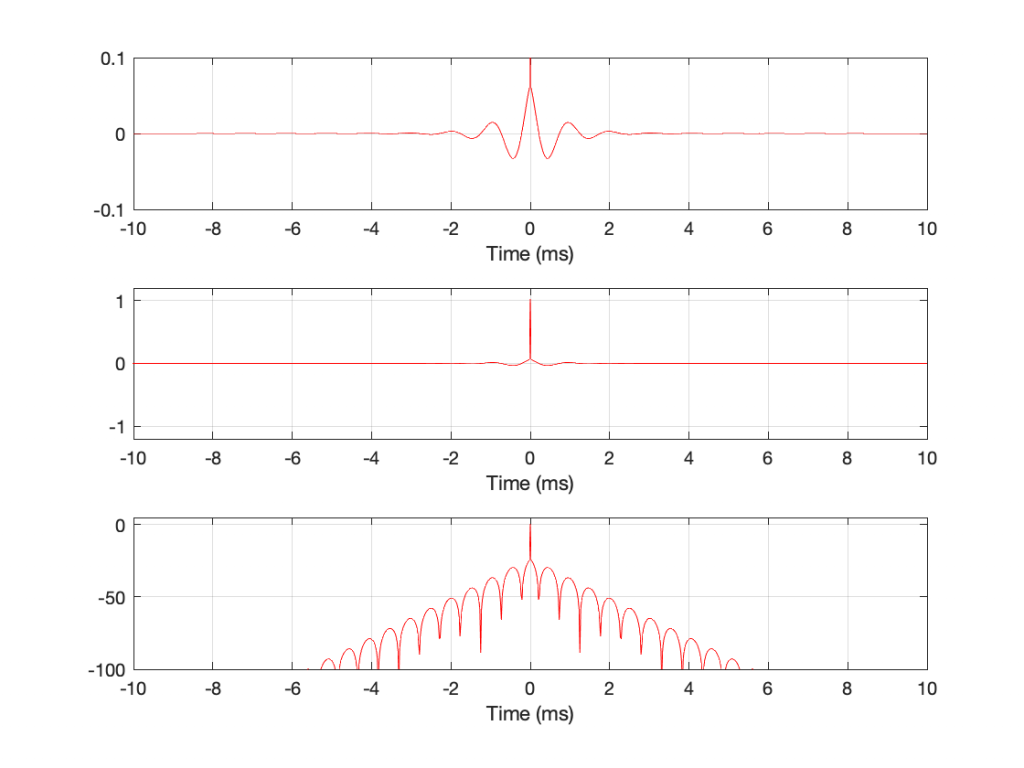
Figure 2: The output from the microphone is the sum of the outputs from the two loudspeakers. At any moment in time, the value of the top plot + the value of the middle plot = the value of the bottom plot.
IF the system is perfect as I described above, then we can play some tricks that could be useful. For example, since the output of the microphone is the sum of the outputs of the two loudspeakers, what happens if the output of one loudspeaker is identical to the other loudspeaker, but reversed in polarity?
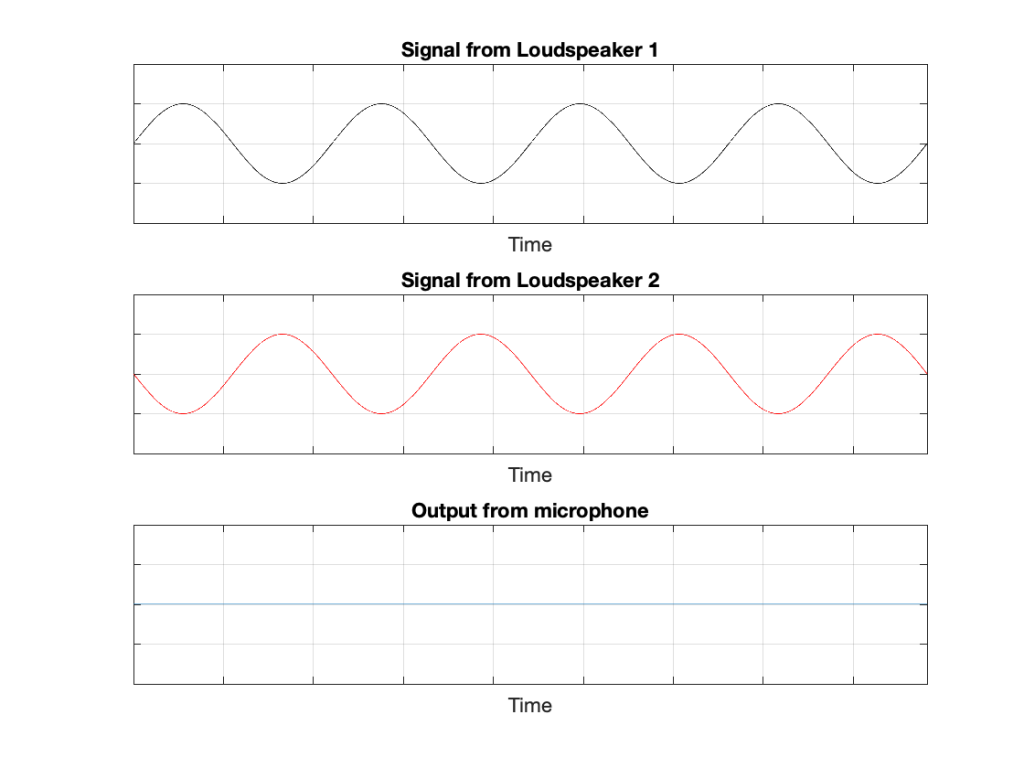
Figure 3: If the output of Loudspeaker 1 is exactly the same as the output of Loudspeaker 2 except for polarity, then the sum (the output of the microphone) is always 0.
In this example, we’re manipulating the signals so that, when they add together, you nothing at the output. This is because, at any moment in time, the value of Loudspeaker 2’s output is the value of Loudspeaker 1’s output * -1. So, in other words, we’re just subtracting the signal from itself at the microphone and we get something called “perfect cancellation” because the two signals cancel each other at all times.
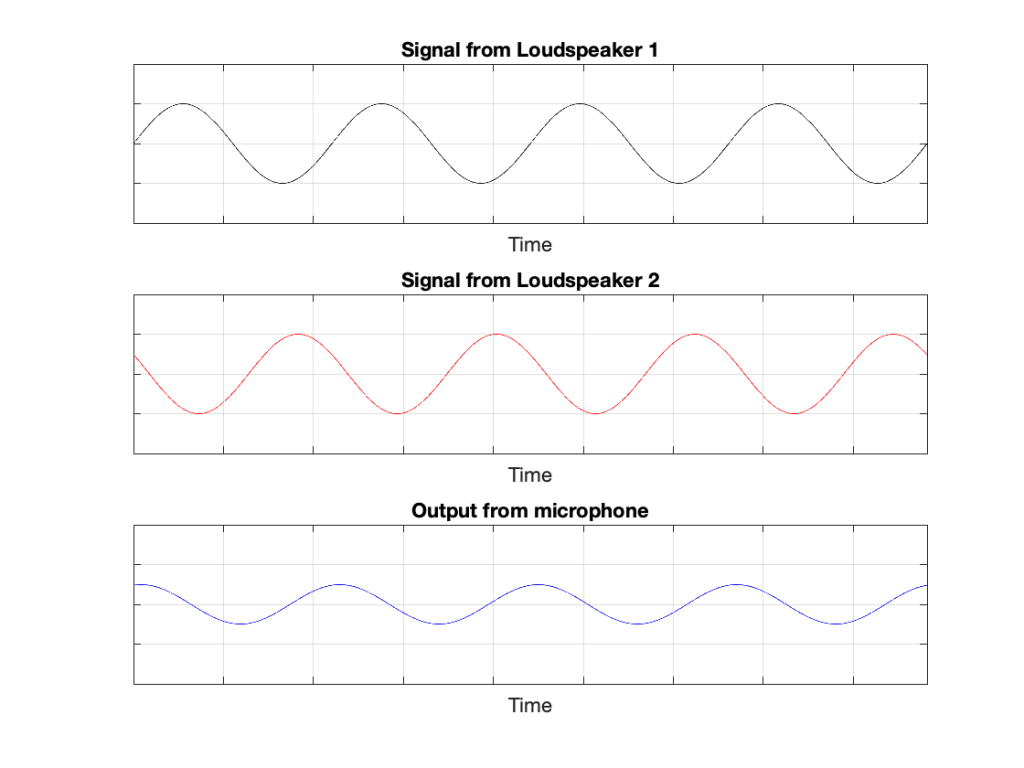
Of course, if anything changes, then this perfect cancellation won’t work. For example, if one of the loudspeakers moves a little farther away than the other, then the system is broken, as shown below.
Figure 4: A small shift in time in the output of Loudspeaker 2 cases the cancellation to stop working so well.
Again, everything that I’ve said above only works when everything is perfect, and the loudspeakers and the microphone are in a free field; so there are no reflections coming in and ruining everything.
We can now combine these two concepts:
using binaural signals to simulate a sound source in a location (although this would normally be done using playback over earphones to keep it simple) and
using signals from loudspeakers to cancel each other at some location in space as a
to create a system for making virtual loudspeakers.
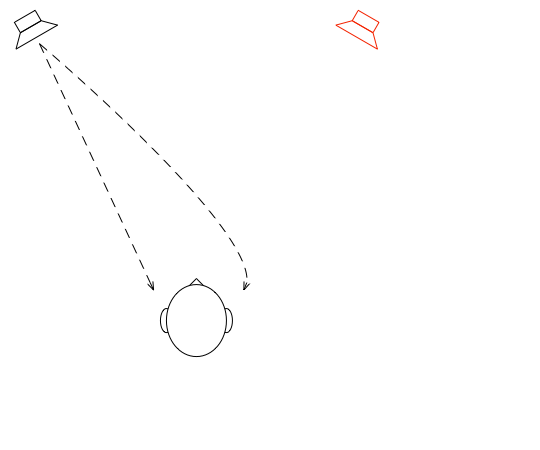
Let’s suspend our adherence to reality and continue with this hypothetical world where everything works as we want… We’ll replace the microphone with a person and consider what happens. To start, let’s just think about the output of the left loudspeaker.
Figure 5: The output of the left loudspeaker reaches both ears with different time/frequency characteristics caused by the HRTF associated with that sound source location.
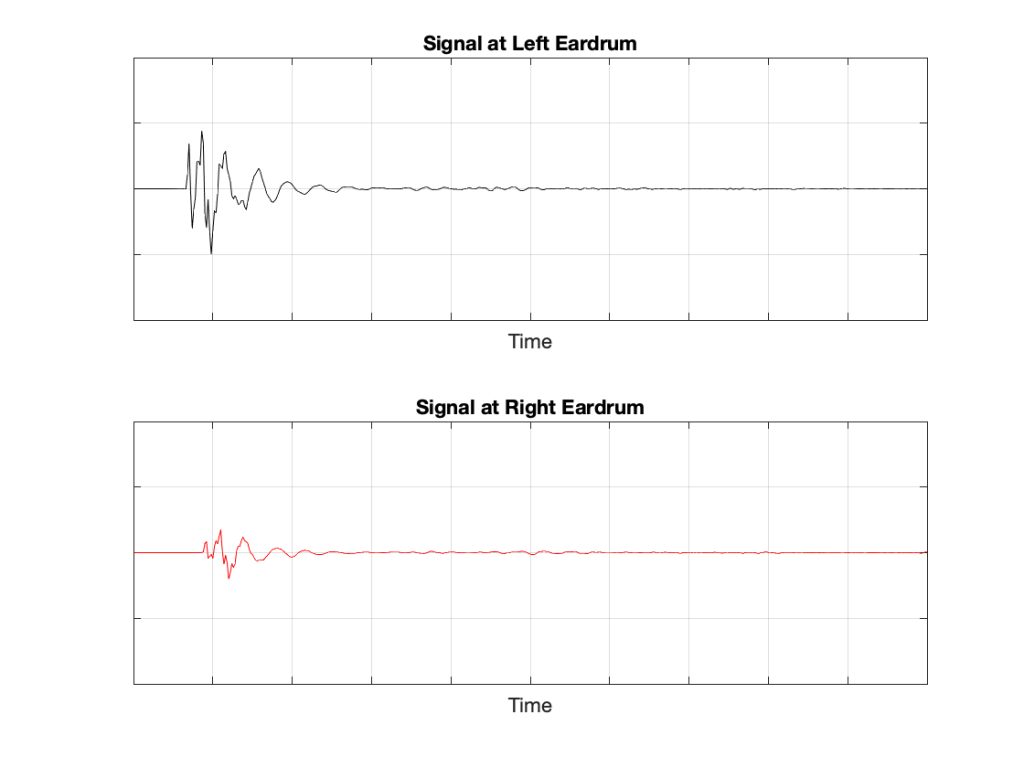
If we plot the impulse responses at the two ears (the “click” sound from the loudspeaker after it’s been modified by the HRTFs for that loudspeaker location), they’ll look like this:
Figure 6: The impulse responses of the HRTFs for a sound source at 30º left of centre.
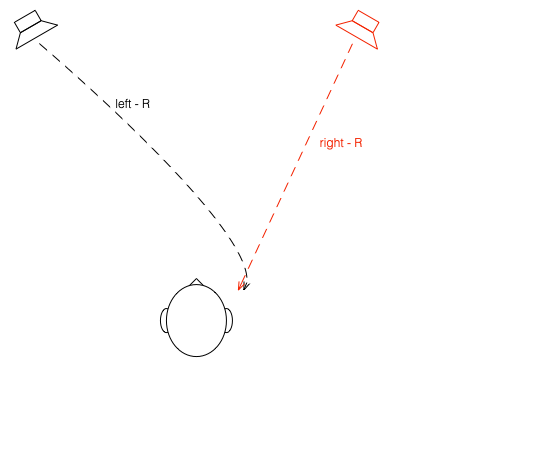
What if were were able to send a signal out of the right loudspeaker so that it cancels the signal from the left loudspeaker at the location of the right eardrum?
Figure 7: What if we could cancel the signal from the left loudspeaker at the right ear using the right loudspeaker?
Unfortunately, this is not quite as easy as it sounds, since the HRTF of the right loudspeaker at the right ear is also in the picture, so we have to be a bit clever about this.
So, in order for this to work we:
Send a signal out of the left loudspeaker. We know that this will get to the right eardrum after it’s been messed up by the HRTF. This is what we want to cancel…
…so we take that same signal, and
filter it with the inverse of the HRTF of the right loudspeaker (to undo the effects of the HRTF of the right loudspeaker’s signal at the right ear)
filter that with the HRTF of the left loudspeaker at the right ear (to match the filtering that’s done by your head and pinna)
multiply by -1 (so that it will cancel when everything comes together at your right eardrum)
and send it out the right loudspeaker.
Hypothetically, that signal (from the right loudspeaker) will reach your right eardrum at the same time as the unprocessed signal from the left loudspeaker and the two will cancel each other, just like the simple example shown in Figure 3. This effect is called crosstalk cancellation, because we use the signal from one loudspeaker to cancel the sound from the other loudspeaker that crosses to the wrong side of your head.
This then means that we have started to build a system where the output of the left loudspeaker is heard ONLY in your left ear. Of course, it’s not perfect because that cancellation signal that I sent out of the right loudspeaker gets to the left ear a little later, so we have to cancel the cancellation signal using the left loudspeaker, and back and forth forever.
If, at the same time, we’re doing the same thing for the other channel, then we’ve built a system where you have the left loudspeaker’s signal in the left ear and the right loudspeaker’s signal in the right ear; just like a pair of headphones!
However, if you get any of these elements wrong, the system will start to under-perform. For example, if the HRTFs that I use to predict your HRTFs are incorrect, then it won’t work as well. Or, if things aren’t time-aligned correctly (because you moved) then the cancellation won’t work.
Without connecting external loudspeakers, Bang & Olufsen’s Beosound Theatre has a total of 11 independent outputs, each of which can be assigned any Speaker Role (or input channel). Four of these are called “virtual” loudspeakers – but what does this mean? There’s a brief explanation of this concept in the Technical Sound Guide for the Theatre (you’ll find the link at the bottom of this page), which I’ve duplicated in a previous posting. However, let’s dig into this concept a little more deeply.
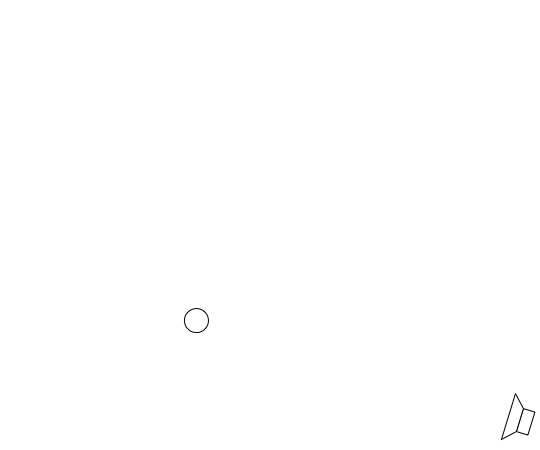
To begin, let’s put a “perfect” loudspeaker in a free field. This means that it’s in a space that has no surfaces to reflect the sound – so it’s an acoustic field where the sound wave is free to travel outwards forever without hitting anything (or at least appear as this is the case). We’ll also put a “perfect” microphone in the same space.
Figure 1: A loudspeaker and a microphone (the circle) in a free field: an infinite space completely free of reflective surfaces.
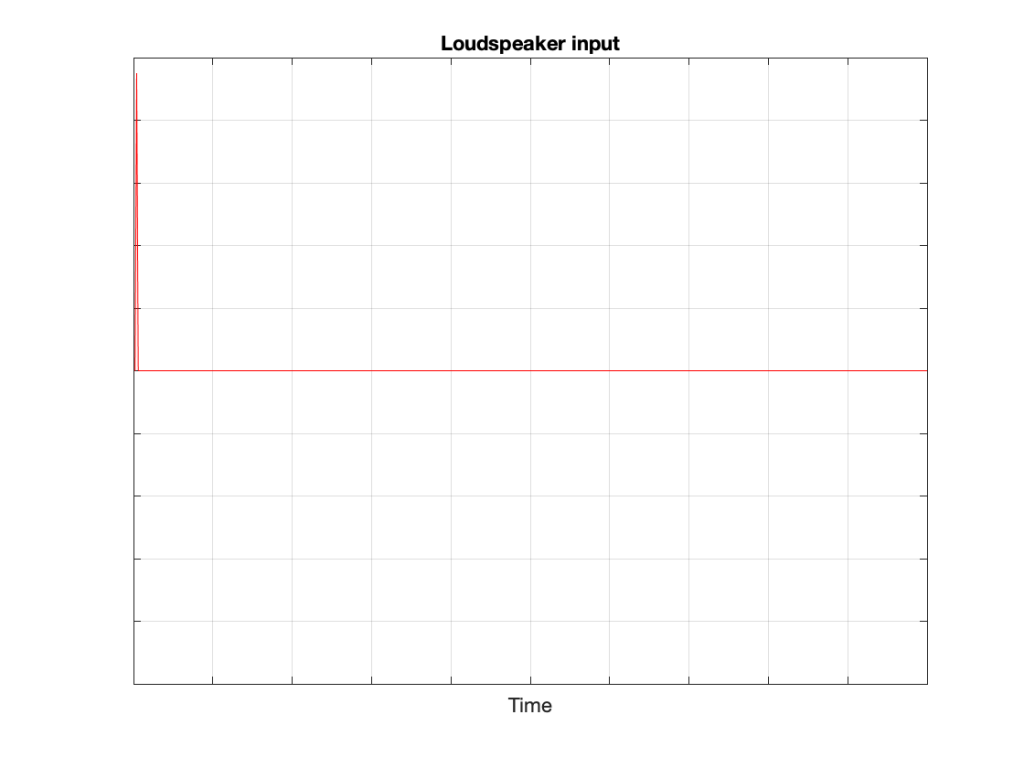
We then send an impulse; a very short, very loud “click” to the loudspeaker. (Actually a perfect impulse is infinitely short and infinitely loud, but this is not only inadvisable but impossible, and probably illegal.)
Figure 2: The “click” signal that’s sent to the input of the loudspeaker.
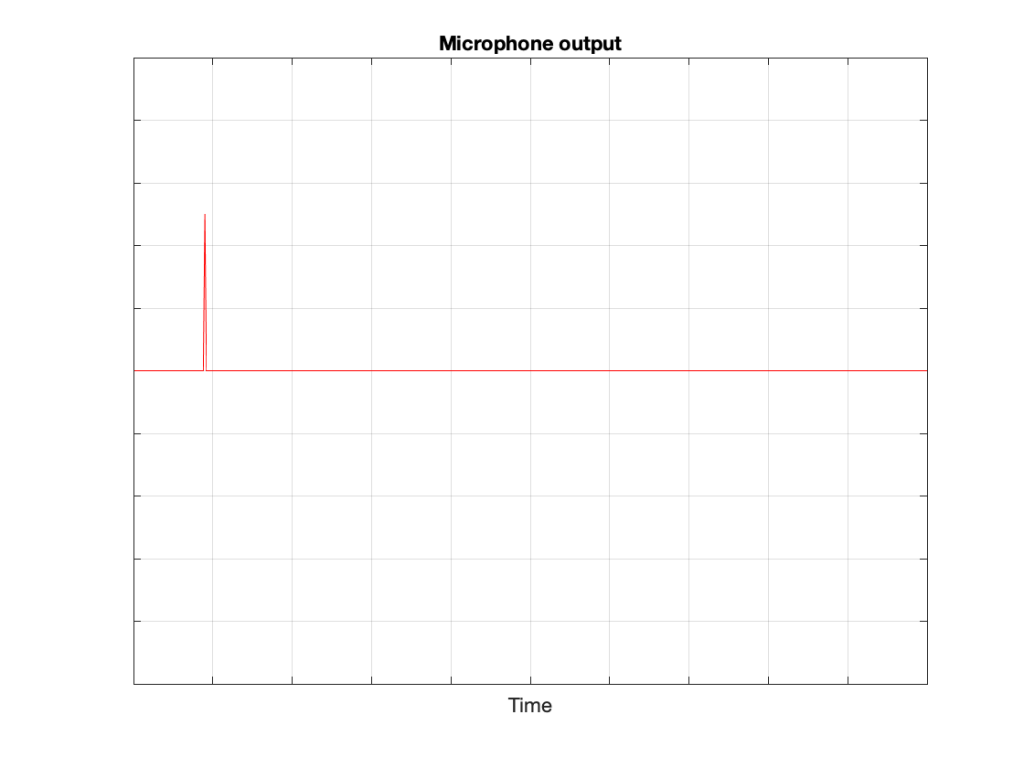
That sound radiates outwards through the free field and reaches the microphone which converts the acoustic signal back to an electrical one so we can look at it.
Figure 3: The “click” signal that is received at the microphone’s location and sent out as an electrical signal.
There are three things to notice when you compare Figure 3 to Figure 2:
The signal’s level is lower. This is because the microphone is some distance from the loudspeaker.
The signal is later. This is because the microphone is some distance from the loudspeaker and sound waves travel pretty slowly.
The general shape of the signals are identical. This is because I said that the loudspeaker and the microphone were both “perfect” and we’re in a space that is completely free of reflections.
What happens if we take away the microphone and put you in the same place instead?
Figure 4: The microphone has been replaced by something more familiar.
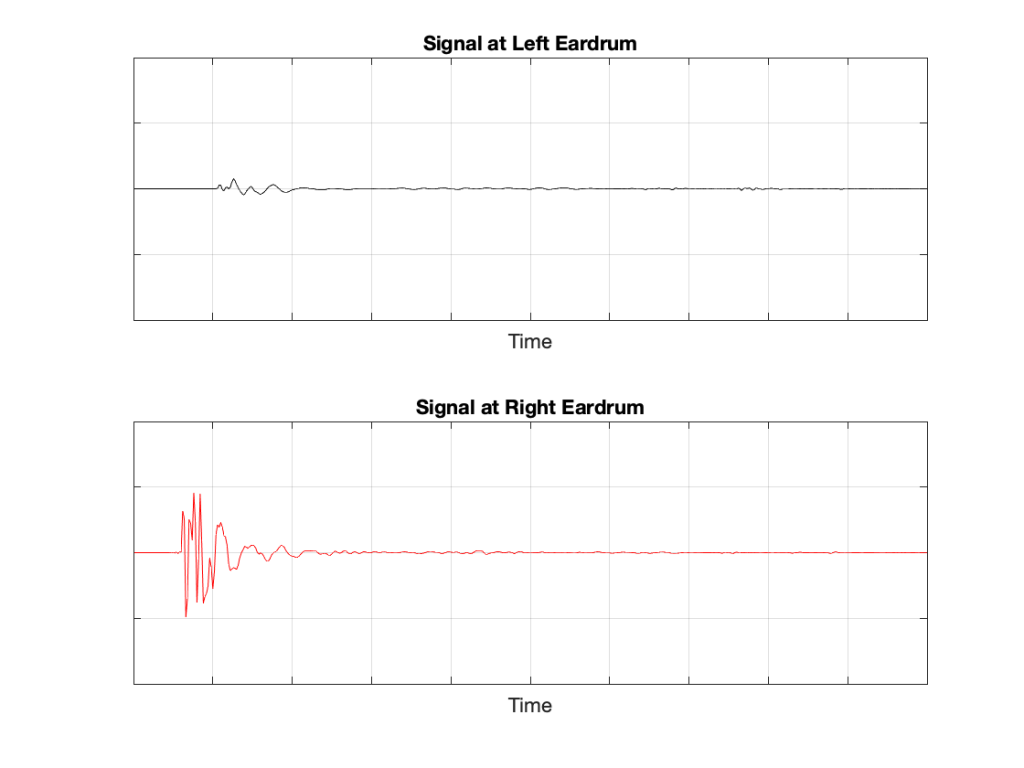
If we now send the same click to the loudspeaker and look at the “outputs” of your two eardrums (the signals that are sent to your brain), these will look something like this:
Figure 5: The outputs of your two eardrums with the same “click” signal from the loudspeaker.
These two signals are obviously very different from the one that the microphone “hears” which should not be a surprise: ears aren’t microphones. However, there are some specific things of which we should take note:
The output of the left eardrum is lower than that of the right eardrum. This is largely because of an effect called “head shadowing” which is exactly what it sounds like. The sound is quieter in your left ear because your head is in the way.
The signal at the right eardrum is earlier than at the left eardrum. This is because the left eardrum is not only farther away, but the sound has to go around your head to get there.
The signal at the right eardrum is earlier than the output of the microphone output (in Figure 3) because it’s closer to the loudspeaker. (I put the microphone at the location of the centre of the simulated head.) Similarly the left ear output is later because it’s farther away.
The signal at the right eardrum is full of spikes. This is mostly caused by reflections off the pinna (the flappy thing on the side of your head that you call your “ear”) that arrive at slightly different times, and all add together to make a mess.
The signal at the left eardrum is “smoother”. This is because the head itself acts as a filter reducing the levels of the high frequency content, which tends to make things less “spiky”.
Both signals last longer in time. This is the effect of the ear canal (the “hole” in the side of your head that you should NOT stick a pencil in) resonating like a little organ pipe.
The difference between the signals in Figures 2 and 4 is a measurement of the effect that your head (including your shoulders, ears/pinnae) has on the transfer of the sound from the loudspeaker to your eardrums. Consequently, we geeks call it a “head-related transfer function” or HRTF. I’ve plotted this HRTF as a measurement of an impulse in time – but I could have converted it to a frequency response instead (which would include the changes in magnitude and phase for different frequencies).
Here’s the cool thing: If I put a pair of headphones on you and played those two signals in Figure 5 to your two ears, you might be able to convince yourself that you hear the click coming from the same place as where that loudspeaker is located.
Although this sounds magical, don’t get too excited right away. Unfortunately, as with most things in life, reality tends to get in the way for a number of reasons:
Your head and ears aren’t the same shape as anyone else’s. Your brain has lived with your head and your ears for a long time, and it’s learned to correlate your HRTFs with the locations of sound sources. If I suddenly feed you a signal that uses my HRTFs, then this trick may or may not work, depending on how similar we are. This is just like borrowing someone else’s glasses. If you have roughly the same prescription, then you can see. However, if the prescriptions are very different, you’ll get a headache very quickly.
In reality, you’re always moving. So, even if the sound source is not moving, the specific details of the HRTFs are always changing (because the relative positions and angles to your ears are changing) but my system doesn’t know about this – so I’m simulating a system where the loudspeaker moves around you as you rotate your head. Since this never happens in real life, it tends to break the simulation.
The stuff I showed above doesn’t include reflections, which is how you determine distance to sources. If I wanted to include reflections, each reflection would have to have its own HRTF processing, depending on its angle relative to your head.
However, hypothetically, this can work, and lots of people have tried. The easiest way to do this is to not bother measuring anything. You just take a “dummy head” -a thing that is the same size as an average human head (maybe with an average torso) and average pinnae* – but with microphones where the eardrums are – and you plunk it down in a seat in a concert hall and record the outputs of the two “ears”. You then listen to this over earphones (we don’t use headphones because we want to remove your pinnae from the equation) and you get a “you are there” experience (assuming that the dummy head’s dimensions and shape are about the same as yours). This is what’s known as a binaural recording because it’s a recording that’s done with two ears (instead of two or more “simple” microphones).
If you want to experience this for yourself, plug a pair of headphones into your computer and do a search for the “Virtual Barber Shop” video. However, if you find that it doesn’t work for you, don’t be upset. It just means that you’re different: just like everyone else.* Typically, recordings like this have a strange effect of things sounding very close in the front, and farther away as sources go to the sides. (Personally, I typically don’t hear anything in the front. All of the sources sound like they’re sitting on the back of my neck and shoulders. This might be because I have a fat head (yes, yes… I know…) and small pinnae (yes, yes…. I know…) – or it might indicate some inherent paranoia of which I am not conscious.)
* Of course, depressingly typically, it goes without saying that the sizes and shapes of commercially-available dummy heads are based on averages of measurements of men only. Neither women nor children are interested in binaural recordings or have any relevance to such things, apparently…
There’s one last thing that I alluded to in a previous part of this series that now needs discussing before I wrap up the topic. Up to now, we’ve looked at how a filter behaves, both in time and magnitude vs. frequency. What we haven’t really dealt with is the question “why are you using a filter in the first place?”
Originally, equalisers were called that because they were used to equalise the high frequency levels that were lost on long-distance telephone transmissions. The kilometres of wire acted as a low-pass filter, and so a circuit had to be used to make the levels of the frequency bands equal again.
Nowadays we use filters and equalisers for all sorts of things – you can use them to add bass or treble because you like it. A loudspeaker developer can use them to correct linear response problems caused by the construction or visual design of the device. They can be used to compensate for the acoustical behaviour of a listening room. Or they can be used to compensate for things like hearing loss. These are just a few examples, but you’ll notice that three of the four of them are used as compensation – just like the original telephone equalisers.
Let’s focus on this application. You have an issue, and you want to fix it with a filter.
IF the problem that you’re trying to fix has a minimum phase characteristic, then a minimum phase filter (implemented either as an analogue circuit or in a DSP) can be used to “fix” the problem not only in the frequency domain – but also in the time domain. IF, however, you use a linear phase filter to fix a minimum phase problem, you might be able to take care of things on a magnitude vs. frequency analysis, but you will NOT fix the problem in the time domain.
This is why you need to know the time-domain behaviour of the problem to choose the correct filter to fix it.
For example, if you’re building a room compensation algorithm, you probably start by doing a measurement of the loudspeaker in a “reference” room / location / environment. This is your target.
You then take the loudspeaker to a different room and measure it again, and you can see the difference between the two.
In order to “undo” this difference with a filter (assuming that this is possible) one strategy is to start by analysing the difference in the two measurements by decomposing it into minimum phase and non-minimum phase components. You can then choose different filters for different tasks. A minimum phase filter can be used to compensate a resonance at a single frequency caused by a room mode. However, the cancellation at a frequency caused by a reflection is not minimum phase, so you can’t just use a filter to boost at that frequency. An octave-smoothed or 1/3-octave smoothed measurement done with pink noise might look like you fixed the problem – but you’ve probably screwed up the time domain.
Another, less intuitive example is when you’re building a loudspeaker, and you want to use a filter to fix a resonance that you can hear. It’s quite possible that the resonance (ringing in the time domain) is actually associated with a dip in the magnitude response (as we saw earlier). This means that, although intuition says “I can hear the resonant frequency sticking out, so I’ll put a dip there with a filter” – in order to correct it properly, you might need to boost it instead. The reason you can hear it is that it’s ringing in the time domain – not because it’s louder. So, a dip makes the problem less audible, but actually worse. In this case, you’re actually just attenuating the symptom, not fixing the problem – like taking an Asprin because you have a broken leg. Your leg is still broken, you just can’t feel it.
So far, we have looked at minimum phase and linear phase examples of one basic kind of filter, but everything I’ve shown you are just examples. There are other filters (I could be showing you shelving filters instead of peaking filters – which would be a through-put plus a low- or high-pass instead of a bandpass) and other implementations (for example, there are other ways to make a linear phase filter).
We won’t go through these other versions because we’re not here to learn how to make filters, we’re here to learn why, when someone asks you “which is better, minimum-phase or linear phase?” or “aren’t you worried about the unnatural effects of pre-ringing?” you can answer “it depends” (which is almost always the correct answer for any question related to audio).
At this point you should know that
a filter that changes the frequency response also changes the time response. This is unavoidable.
some filters will also ‘pre-ring’ ahead of the sound
a filter may or may not have an effect on the phase of the signal
If you’re designing (or choosing) a filter, nothing comes for free. (For example, if you want linear phase, the price is latency. There are other prices attached to other design decisions.)
The question that we have not yet addressed is “so what?”
This is the point in the discussion where things are going to get a little fuzzy… Hang on!
You probably read somewhere that human hearing extends from 20 Hz to 20 kHz, therefore anything outside that range is not audible. This is not true. You might have read a little farther where they added an extra detail saying something about your age: the older you are, the lower that top number gets. That might be true.
You can also read that the quietest sound you can hear has a sound pressure level of 20 µPa, which is equivalent to 0 dB SPL, and that the loudest sound you can “hear” (over the sound of your screams of pain) is about 120 dB SPL or so. You might have also read a little farther where they added an extra detail that points out that this is only at 1 kHz. But this is probably also not true.
There are many reasons why all of those numbers are basically meaningless – but the main one is that they’re numbers based on averages. Imagine if an optometrist only carried one strength of glasses, which happened to be the average of the prescriptions required by all of his or her patients. We’d all be tripping over out own feet, and getting blinding headaches caused by wearing the wrong glasses.
Actually, a similar point was once proven by the American Air Force. They wanted to design the perfect airplane cockpit, so they measured all their pilots, averaged all the numbers, and built a seat for the result. Of course, the result was that the seat fit no one, since there was no single person that matched the average.
There are other examples that prove that averages are useless information. For example, I have more than the average number of legs. Also, since one in every three mammals on the earth is a bat, if I have meeting with two other people, one of us must be Batman…
Of course, the message is that we’re all different. For example. I don’t taste things very well. I don’t understand people who talk about the various elements in the taste of wine. All I know is that it’s drinkable, or it’s good for putting on fish & chips. When I eat food, I tend to put on pepper and chill so that I can at least taste something…
Hearing is the same: so all of the stuff I’m about to say is based on averages, which may or may not apply to you. You might be more or less sensitive than the average. Don’t email me to argue about the numbers I’m using here. You’re different. I know… We all are…
Psychoacoustic Masking
Let’s go to an AC/DC concert together. Halfway through You Shook Me (All Night Long), I’ll whisper a secret code word into your left ear. Then, you whisper it back to me.
This exercise will not work. You won’t hear me, which is strange because the changes in air pressure that I’m making by whispering are exactly the same as when AC/DC is not playing – and normally, you’d be able to hear that. Also, your eardrum is wiggling in exactly the same way as a result of that whispering – it also happens to be wiggling to the AC/DC more. So, why can’t you hear me?
The answer lies in your brain. It decides that I’m not as important as AC/DC, so the signal is thrown out as being irrelevant, and so the sound my my whispering is ‘psychoacoustically masked’ by AC/DC. Notice the ‘psycho-‘ part of that, which is the indication that the acoustic masking is happening in your brain, not as a result of a mechanical or physical issue.
This probably doesn’t come as a surprise – at some point in your life, you’ve probably been somewhere where you’ve asked someone to speak up because you can’t hear them over the noise. You’ve been the victim of the limitations of your own brain.
Temporal Masking
What might come as a surprise is that this effect also works when the loud sound (AC/DC) and the quiet sound (me whispering) don’t happen simultaneously.
For example, let’s say that you are getting your photo taken by someone with a flash camera. You’re looking right at the camera, and the flash goes off. For a short while after that, you can’t see anything but the leftover spot in the middle of your vision. If, right after the flash, someone were to hold up some number of fingers and ask “how many fingers?”, you’d have to guess. (This is only an analogous example; the spot in your eyes is not happening in your brain, but the effect is similar.)
Similarly, if I were to fire a gun (not at you… don’t worry), and quickly whisper a word immediately afterwards, you wouldn’t hear the whisper. The gunshot and the whisper didn’t happen simultaneously, but there is temporal masking that causes you to not hear the quieter sound for a little which after the loud sound has happened.
Even weirder, there is an effect called pre-masking. If I were REALLY quick and VERY well-timed, I could whisper the word right BEFORE the gunshot and you also wouldn’t hear it. The loud sound (the gun shot) not only masks quiet sounds that come after it, but also sounds that come before it.
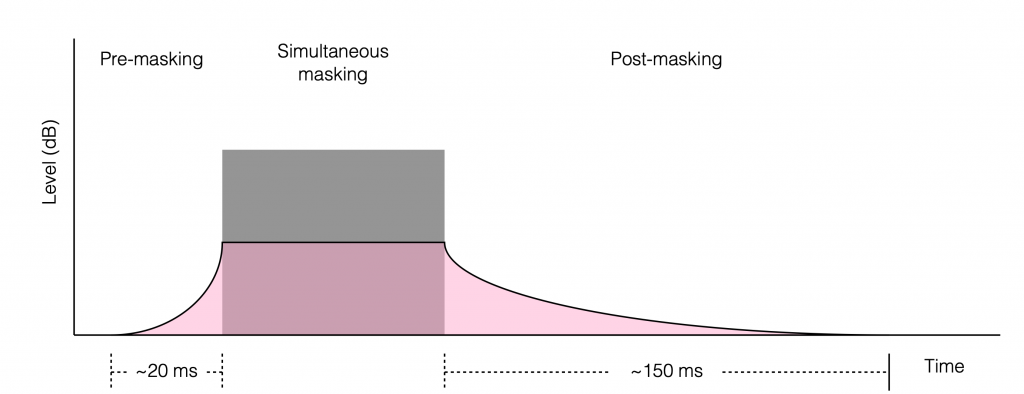
Fig 1. Generalised representation of temporal masking. The gray block is a loud noise. Anything in the pink area won’t be heard by most people most of the time. This plot is intentionally vague. The point is the effect, not the actual values.
So, if I were to play a loud noise (a gunshot, a blast of pink noise, a portion of an AC/DC song) and play a quiet sound before, during, or afterwards, and ask what the quiet sound was (to test if you heard it) your behaviour will match something like the plot in Figure 1. The gray block represents the loud sound. Anything in the pink shape is “stuff you can’t hear”. If the quiet sound occurs much earlier or much later than the loud sound, then it will have to be really quiet for you to not hear it. The closer in time the quiet sound occurs to the loud sound, the louder it has to be for you to hear it.
Of course, this is very general plot, so don’t use it for arguments while you’re drinking beer with your friends. For example, one element that I have not mentioned is frequency content. If the loud sound is the low frequency effects of a recording of distant thunder, and the quiet sound is a kitten mewing, then these two sounds are too far apart in frequency to have any influence on each other, and the graph is just plain wrong.
Signal Envelope
Unless you, like me, spend a lot of time listening to sinusoidal tones, you’ll notice that everything you listen to varies in level over time. This happens on different time scales. The sound pressure level (SPL) in the car while you’re driving to work or at the daycare picking up the kids is much louder than the SPL in your bedroom while you’re dealing with the free-floating existential anxiety that comes to visit at 2:00 in the morning. This is the ‘slow’ time scale. On the ‘fast’ end of the time scale, you have the extreme, and short SPL cause by closing a car door, or the very short, but not very loud sound of a high heel impacting a hardwood or tiled floor. Speech is somewhere in between these two. There are short, spikes caused by “t-” and “k-” sounds, and long-ish portions produced by vowels.
Note that we’re not really talking about how loud or how quiet things are. We’re talking about the change in level from quieter to louder and back again.
If we plot that change over time, we have a view of the signal’s envelope. For example, a single note on a piano has a fast attack (from quieter to louder) and a slow decay (from louder to quieter). A car horn honked in an open area (not a city intersection, where there are buildings to reflect the sound) has almost identical attack and decay envelopes.
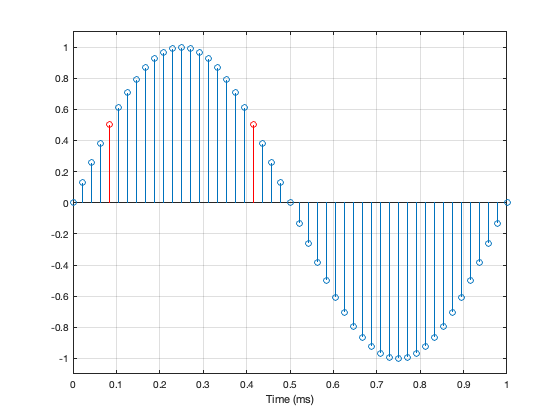
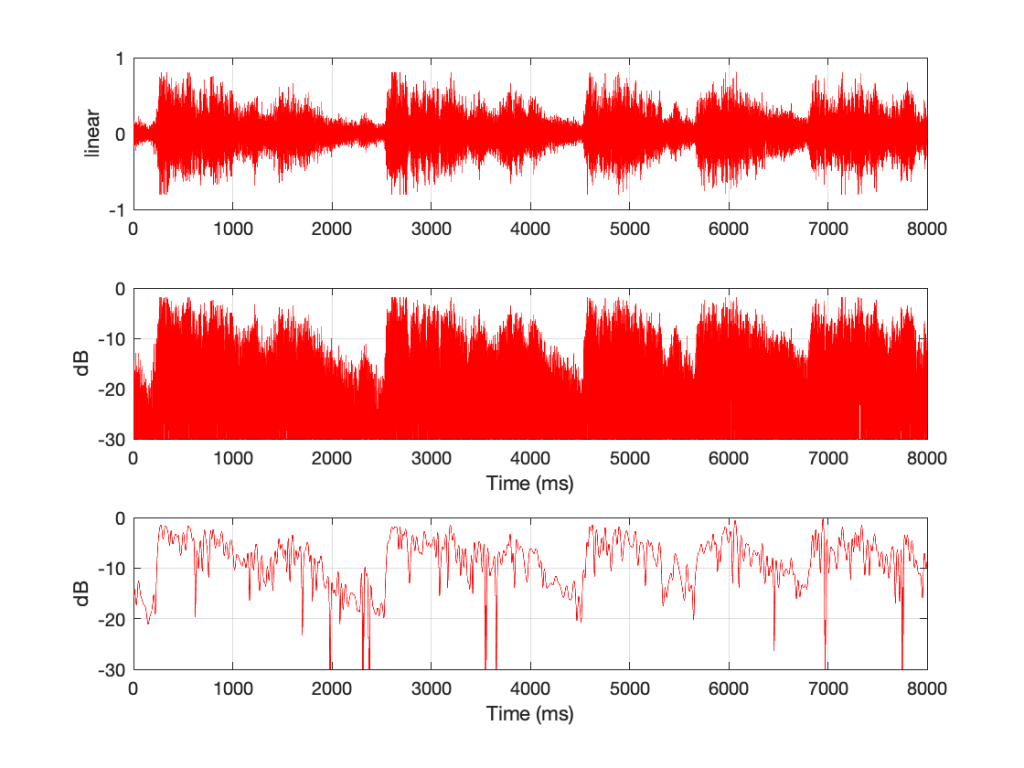
Fig 1. Three different representations of an audio signal in time.
Figure 1 shows an 8-second slice of a recording of the Alleluia Chorus from Handel’s “Messiah”, chosen because it’s easy for me to load that into Matlab using the “load handel” command, and I’m very lazy.
The top plot shows the signal in the way we’re used to looking at sound files. The x-axis is time, in ms. The Y-axis shows the linear value of each of the samples. Oddly, this is the way we normally look at sound files, but it represents how we hear sound very poorly, because we don’t hear amplitude linearly.
So, in the middle plot, I’ve taken the same data and, sample-by-sample, plotted each value on a decibel scale (using the equation DisplayOutput = 20*log10(abs(signal)). The absolute value is there because calculating the log of a negative number gives you strange results)
The third plot is the one we’re really interested in. That’s created by connecting the peaks in the middle plot, which results in a running plot of the signal’s level over time. This is its envelope. As you can see in that particular musical example, the attacks (the changes from quieter to louder) are steeper (and therefore faster) than the decays. This is not surprising. It’s hard to get an orchestra and choir to all stop instantaneously…
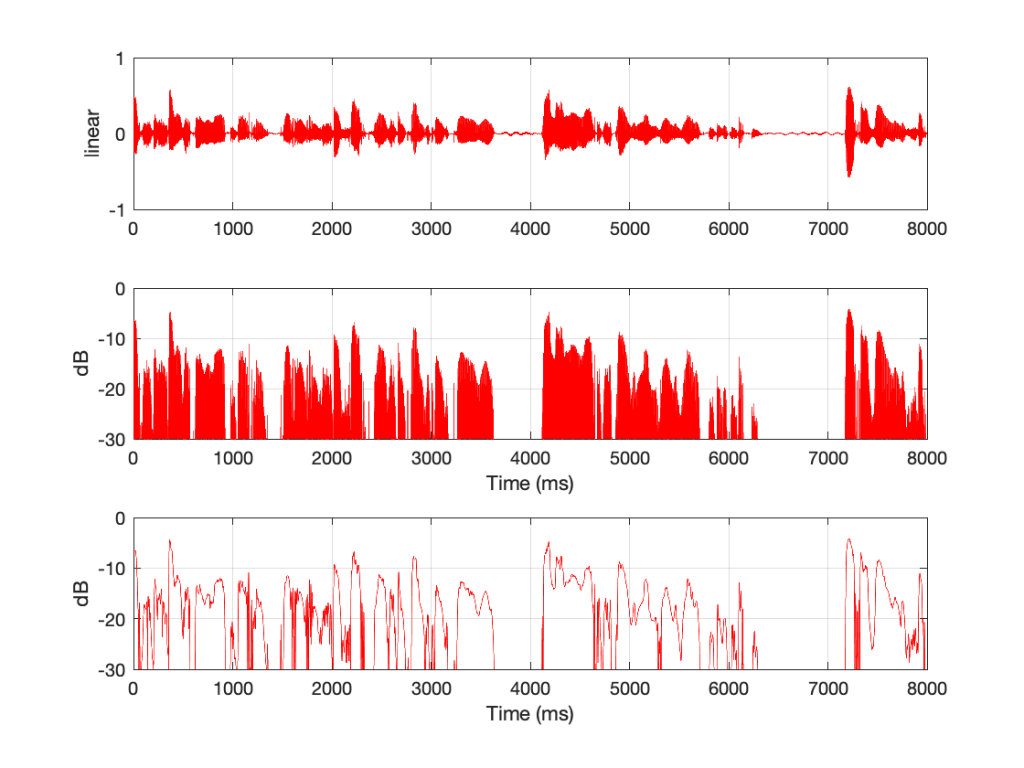
Fig 2. The same treatment to a different audio signal. In this case, it’s female speech recorded in an anechoic chamber.
Figure 2 shows the same three ways of plotting an audio signal, but in this case, the signal is female speech recorded in an anechoic chamber. Notice that, partly because it’s only one sound source and partly because there is no reverberation in the signal, the decays are almost as fast as the attacks. However, this is a very strange recording. Most people don’t listen to anything in an anechoic chamber, and we don’t typically go to the middle of a football field or a frozen lake to have a conversation.
Back to the “so what?”
Let’s assemble the three collections of information that we’ve been throwing around.
Firstly, focusing on filter response:
We know that filters can ring.
We also know that some filters can pre-ring.
We also know that, unless the Q is really high, that ringing decays pretty quickly.
Finally, we know that, if the frequency that’s ringing in the filter is not present in the signal, it won’t ring because there’s nothing there to ring. (Similarly if you turn up the low bass while listening to a solo piccolo recording, you won’t hear a difference because there’s no bass to boost.)
Secondly, we looked at our own response to quiet and loud signals in time
A loud sound will simultaneously mask a quiet sound that occurs at the same time (fancy-talk for “drown it out so I can’t hear it)
The loud sound will also post-mask a quiet sound that occurs after within a short time window (on the order of 100 – 200 ms)
The loud sound will also pre-mask a quiet sound that occurs before it within a short time window (on the order of 10 – 20 ms)
Finally, we looked at signal envelopes – the change in level of an audio signal over time
Sounds never start instantaneously. In order to do so, they would have to have an infinite frequency range measured at the receiver (e.g. your eardrum, which is most certainly band-limited as well). Even very fast attacks take milliseconds to ramp up.
Sounds in real life have longer decay times
I know, I know, you can name sounds that have very fast attacks (e.g. the pluck of a harpsichord plectrum on a high string, or a single xylophone bar struck in an anechoic environment) and very fast decays (ummm…. good luck finding something that decays more than 100 dB in less than 100 ms…)
The question is: if you have a filter that rings or pre-rings, and you apply it to a sound,
Is that ringing the thing that defines the envelope of the resulting sound? In other words, does the signal’s attack and/or decay envelope change significantly as a result of the time response of the filter?
Is that change in the envelope outside the limits of your ability to detect it due to pre-masking and post-masking?
There is no single answer to this question. If the audio signal is someone hitting a rim shot, and the filter is a peak filter with 12 dB of gain at 500 Hz with a Q of 100, then you’ll hear it ringing. In fact, it will sound like a rim shot with a sine wave generator. If the audio signal is a single bowed note on a ‘cello, and the filter is a dip filter with -3 dB of gain at 100 Hz with a Q of 0.707, then you won’t.
However, (for example) you CANNOT automatically jump to a conclusion that “pre-ringing sounds unnatural” because that starts with the assumption that you can hear it, and therefore it sounds “like” anything.
Whether or not you can hear the effects of a filter applied to an audio signal is dependent not only on the very specific characteristics of the filter, but its interaction with the signal. Change the filter OR change the signal, and the result will change.
This means that you CANNOT say things like “linear phase filters are better (or worse) than minimum phase filters” or “the pre-ringing of a linear phase filter sounds unnatural” because both of those statements start with the (possibly incorrect) assumption that you can hear the effect of the filter.
Now, don’t mis-interpret what I’ve said to mean “you can’t hear a filter ringing” – I didn’t say that. What I said was “just because a filter can be measured to be ringing doesn’t necessarily mean that you can hear it with a given audio signal”.
In this part, we’re going to do something a little weird.
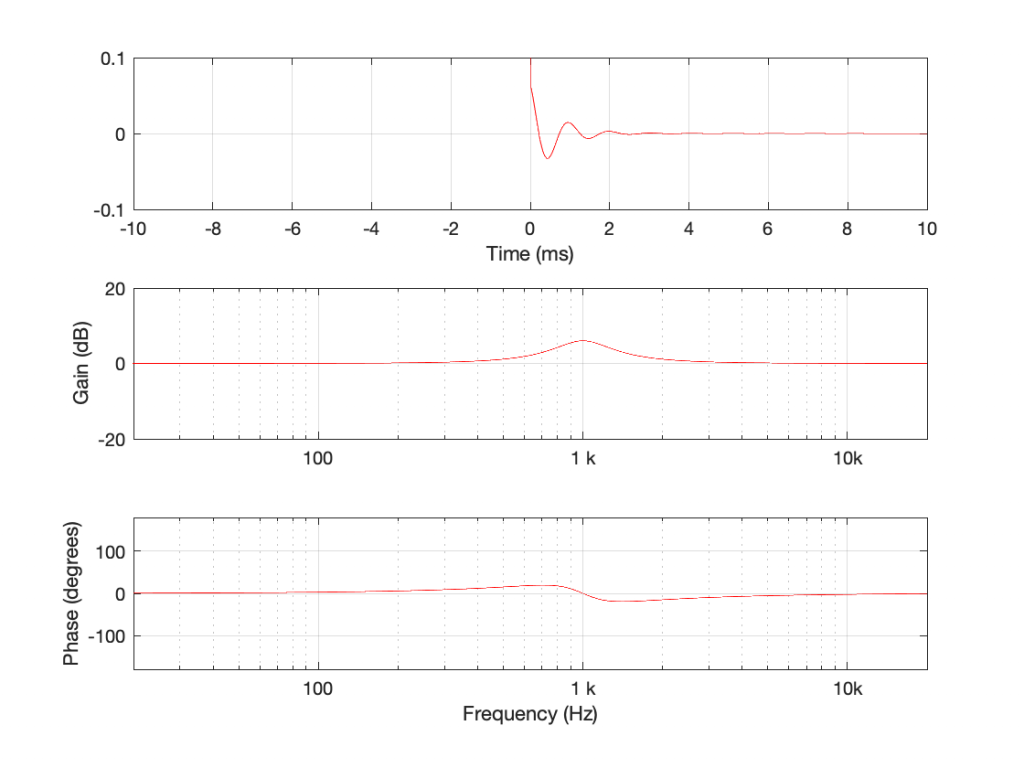
We’ll start by making a minimum phase peaking filter that has Q of 2 and a gain of +6 dB. The response of that filter is shown in Figure 1.
Fig 1. A minimum phase implementation of a peaking filter with a centre frequency of 1 kHz, a gain of 6 dB and a Q of 2.
Almost everything in the plots above should look familiar. The one weird thing is that I’ve left out the data in the time response before T = 0 ms. That’s because the future doesn’t matter, since we’re talking about a non-causal filter, right?
What if I (for some reason) wanted to make a filter that had a desired magnitude response, but a flat phase response? Let’s say that you’re allergic to phase shifts or you belong to an ancient religious cult that thinks that phase shifts are against the order of nature. How would we create that filter?
One way to do it is to create a filter that has the same magnitude response as the one above, but with an opposite phase response so that the two cancel each other. But, how do we create a filter with the opposite phase response?
One trick for doing this is to ignore what I said earlier. Remember when I was being pedantic about how filters advance signals in phase BUT NOT TIME? What if you were to ignore that for a brief moment? Could we use that ignorance to an advantage?
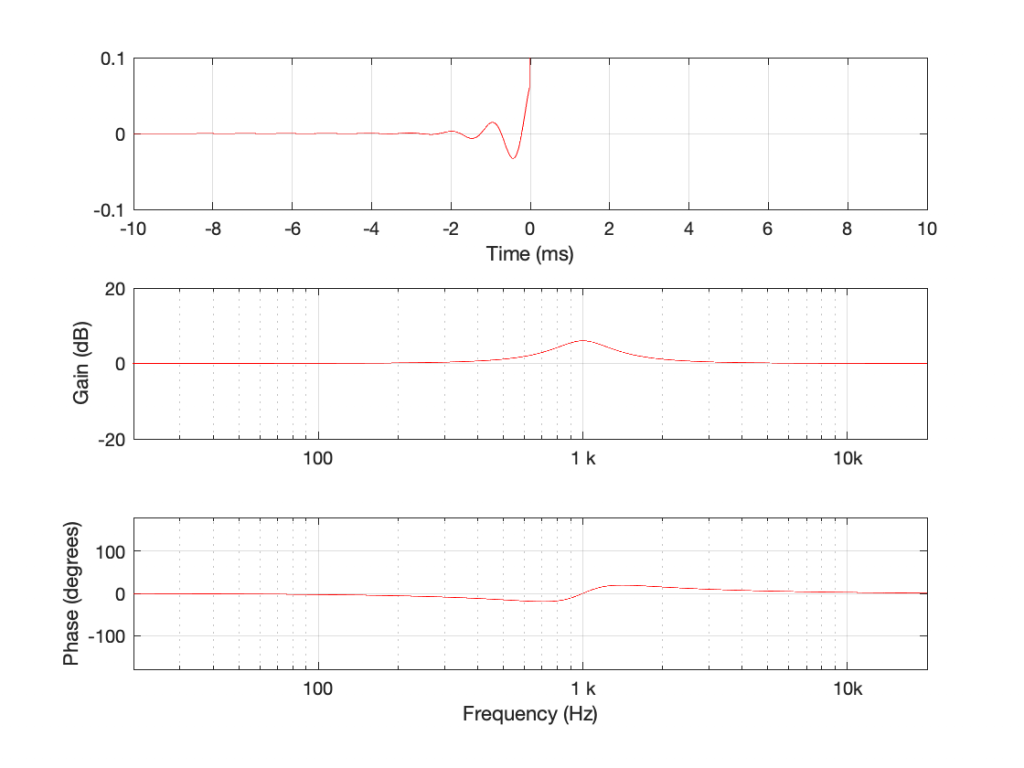
For example, what would happen if we took the time response shown above and reversed it? All of the component frequencies are still there, at all the same relative amplitudes. So the Magnitude Response won’t change. But what happens to the phase response? The answer is this:
Fig 2. The same impulse response as shown in Figure 1, reversed in time.
Now we have a weird filter that can only have an output based on future inputs (therefore it’s non-causal, and therefore not minimum-phase), with the same magnitude response as the one shown in Figure 1. But check out that phase response. It’s the inverse of the first filter.
So reversing time has the effect of flipping the polarity of the phase (not the polarity of the signal!) without modifying the magnitude response. What would have been a 45º phase shift (earlier) becomes a -45º phase shift (later).
So, if I were (conceptually – not really…) to put these two filters in series, feeding the output of one into the input of the other then their total magnitude responses would add (so I’d get a 12 dB boost instead of a 6 dB boost at 1 kHz) and their phase responses would cancel each other out. The end result would look like this:
Fig 3. The combination of the filters in Figure 1 and Figure 2. Notice that it has a gain of 12 dB at 1 kHz (because 6 + 6 = 12)
By now, you’ve probably figured out that what we’re looking at here is a linear phase filter, since can be used to change the magnitude response of a signal without mucking up its phase response.
The catch with this way of implementing a linear phase filter is that it has to see into the future. Of course, in real life this is difficult, but there is a trick you can use to fake it.
If you look at the impulse response plot in Figure 1, you can see that the peak in the response is at Time = 0 ms. As you get later, moving away from that moment in time, the signal is quieter and quieter until it dies away to (almost) nothing. The problem is that ‘almost nothing’ is not the same as ‘nothing’. In fact, if we’re being pedantic, the ringing keeps going forever, which is why it’s called a filter with an Infinite Impulse Response – an IIR filter.
This also means that the same is true for the filter in Figure 2, but the ringing extends infinitely backwards in time.
However, our resolution in measuring and storing the amplitude is not infinite – when the signal is quiet enough, we run out of resolution (‘ticks’ on the ruler) – and when the signal gets that quiet, it effectively becomes the same as nothing.
So, if we decide on the level where ‘almost nothing’ is the same as ‘nothing’ (this is more-or-less up to us if we’re the ones designing the filter), then we can look at the filter’s response and decide when that signal level is reached (both forwards and backwards in time).
For example, with the extremely limited resolution of the plots that I’ve made above, we can decide that ‘nothing’ is what’s left when you get ±10 ms from the impulse peak. Of course, the resolution of the pixels on that plot is not even close to the resolution of the audio signal, so ‘nothing’ on our plot and ‘nothing’ for the audio signal are two different things – but the concept is the same.
Back to the Future
Let’s pretend for a moment that, for the impulse response in Figure 3, we decide that ±10 ms is the window of time we need to get to ‘nothing’. This means that we could implement this filter by sending audio into it, letting it pre-ring with an increasing amount until it hits the maximum peak 10 ms after the sound comes into it, then ringing for another 10 ms until it’s out.
This means that the latency (the delay time between the input and the output of the filter) would appear to be 10 ms. Yes, when you feed in a signal, you immediately start getting something out of the filter, but the output is loudest after the signal has been feeding into the filter for 10 ms.
In other words, if you want to have a linear-phase filter that’s implemented using this method, you are going to have to accept that the cost will be latency. In our case (a filter with a Q of 2, with a centre frequency of 1 kHz, and the decisions we’ve made here) this results in a 10 ms latency. Change a parameter, and you change the latency. For example, as we’ve already seen, the lower the centre frequency, the longer in time the filter will ring. So, if we change the centre frequency of this filter to 100 Hz, then it will have 10 times the latency (because 100 Hz is 1/10 of 1 kHz – therefore the periodicity of the ringing is 10x longer). If we increase the Q, then the ringing lasts longer – both forwards and backwards and time.
Generally speaking, this means that, if you’re building a linear phase filter, you need to decide what characteristics the filter has, and then you need to start making decisions about the quality of the filter (e.g. is the response exactly what you want, or is just almost what you want?) and its latency.
Although I’m not going to talk about implementation much, the latency has two primary considerations. The first is obvious: are you willing to wait for the output? If you’re building a filter for a PA system, then you don’t want the output delayed so much that it sounds like an echo. However, the second issue is one for the person building the filter: latency means memory. This was a bigger problem in the ‘old days’ when memory was expensive, but it’s still an issue.
Why? The problem is that the latency is defined by the frequency and Q of the filter, which define the total time the filter takes to get through the entire impulse response. However, the filter’s processing doesn’t think of time in milliseconds, it thinks in samples. If you double the sampling rate, then you double the amount of memory you need to implement the filter.
So, going from 48 kHz to 192 kHz requires 4x the memory.
A little perspective
One thing to notice in the three figures above is the vertical scale of the time response plots. You can see there that the range is ±0.1, which is a zoomed-in view of the amplitude. This may give you a distorted impression of the level of the ringing relative to the signal (the impulse). Figure 4 should clear this up.
Fig 4. Three plots showing exactly the same data in three different ways.
The top plot in Figure 4 is identical to the top plot in Figure 3. The middle plot is also on a linear amplitude scale, but the range of the plot shows the entire range of the signal. You can see there that the impulse at T = 0 hits a value of 1, and so the pre- and post-ringing isn’t as loud as you might have thought based on the first three figures.
The bottom plot shows the same information, plotted on a dB scale instead. The impulse at T = 0 ms hits 0 dB. Relative to that, the pre- and post-ringing has a maximum value of about -24 dB. You can also see there that the ringing is at least 100 dB down by the time we’re 6 ms away from the main impulse, looking both backwards and forwards in time.
Of course, all of these characteristics would be different for filters with different parameters. The point here is to understand the general characteristics, not the specifics.
Additional Comment
You may read on various fora someone who claims that there’s no such thing as “pre-ringing”. “It’s ‘ripple'” They’ll claim.
This is incorrect.
Pre-ringing and ringing are behaviours that occur in the time domain.
Ripple is a wiggle in the response in the frequency domain. (Say, for example, you zoom into the magnitude response, it won’t be completely flat in some cases – and if it’s not, you have ripple.)