It was the third of June, another sleepy, dusty Delta day I was out choppin’ cotton, and my brother was balin’ hay
I’ve always liked the song “Ode to Billy Joe”. It starts on a 7-chord, so you know it’s going to go somewhere… I love how Papa, when he hears that Billy Joe jumped off the Tallahatchie Bridge just says that he “never had a lick of sense”, and asks for more biscuits. And who, exactly, did Brother Taylor see with Billy Joe? What did they throw off the bridge?
I like the fact that there are many questions and few answers – and life just goes on anyway…
But we’re not here to talk about songwriting, we’re here to talk about typical errors in digital audio – specifically today – streaming services.
This error is an easy one to discuss – but an important one nonetheless…
When I’m sitting at work, typing on my computer, I listen to music a lot. Usually, I use the “Audirvana” software on my Mac, with an external Teac UD-501 USB-Audio headphone DAC (which does the digital-to-analogue conversion and the amplification for the headphones, all in one box). The reasons I choose to use Audirvana are (1) that it can play all of my files (I have some DSD stuff on my hard drive), it can stream directly to my external DAC without routing the audio through Mac’s OS, and it can also see my Tidal account.
Now, just to be clear, this posting is not an advertisement for Apple, Audirvana, Teac, or Tidal. I mention all of that just as background information… I also drive an 11-year old base-model Honda Civic (that will come up later in this posting) and I wear Ecco shoes (which is completely irrelevant…).
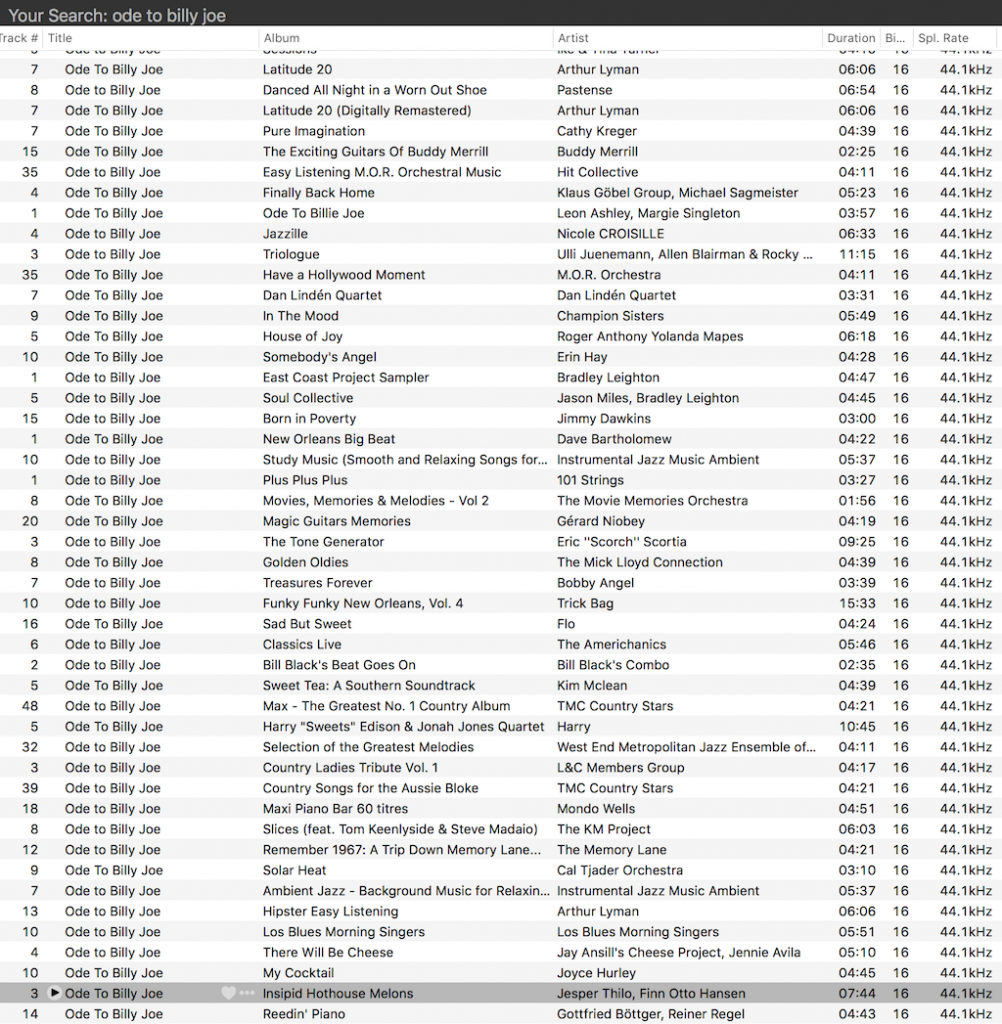
If you use Audirvana to search Tidal for tracks called “Ode to Billy Joe” You will get 300 hits. I don’t know if this is because there are 300 covers of that song on Tidal (I doubt it) or if 300 is a limit on the number of tracks either Tidal or Audirvana will report in a Search function (I suspect that this is the case…)
As you can see in the screenshot in Figure 1, all of them are 16 bit, 44.1 kHz files. So far so good…
Fig 1: There are many “Ode to Billy Joe” covers in Tidal
I have two favourite versions of this song. One of them is by Paula Cole (the other is by Patty Smyth). If I press “play” on the Paul Cole version, and I look at the top of the screen, I see something like the screenshot in Figure 2.
Fig 2: Ode to Billy Joe
One of the nice things about Audirvana is that it tells you a little technical information about the track to which you’re listening. Notice there on the right-hand side of the screenshot above, that we’re listening to a 16-bit, 44.1 kHz FLAC file.
This makes sense. In fact, it’s what I expect, since my Tidal subscription promises “lossless high fidelity sound quality” – that’s why I pay extra for a Tidal HiFi subscription…
So far so good.
One of my less-favourite renditions of “Ode to Billy Joe” is performed by The Stadium Saxophone Players on their album “Timeless Sax Instrumentals – Volume 2”. IF I press play on this version, and look at the top of my Audirvana window, I see the information in Figure 3.
Fig 3: Ode to Billy Joe
Interesting…. Notice that I am now listening to a 96 kbps AAC file with a 16-bit word length, and a sampling rate of “22.1 kHz” (actually 22.05 kHz – half of 44.1). So much for “lossless high fidelity sound quality”.
This calls for more investigation.
So, I pressed “Play” on the top hits in my search, one by one, and checked the file format displayed on the screen. The results of this “test” was that, in the first 66 “Ode to Billy Joe’s” listed, 6 of them were 96 kbps AAC files, 60 of them were FLAC.
So, for this sampling, roughly 9% of the available tracks were not in a lossless format, and were not even full bandwidth. Admittedly, the tracks that were in the lower-quality format were versions that I would not listen to anyway – so, to be honest, I don’t really care too much.
Now, before you mis-interpret me, I want to be very explicit and state that this is NOT Tidal’s fault. Of course they did not ask for an AAC version of the file they put on their hard drives. This was the file format supplied to them by the record label (to use an increasingly old-fashioned term…). So, we can’t blame Tidal for this – and I’m quite certain that they’re not the only streaming service that “suffers” from this issue.
However, what my little test shows is that what Tidal is actually selling me is the capability of streaming “lossless high fidelity sound quality” – and not a guarantee that what is in the “pipe” really is lossless.
Of course, this is not just true for streaming services. Other people have shown that some higher-priced “high resolution” audio files that you can purchase online are actually just a bit-for-bit copy of the “normal resolution” version of the same track. I have at least one CD that contains at least one track that has MP3 artefacts obvious enough that I can hear them on my unbranded audio system in my 11-year old Honda Civic while I’m driving… (It’s a compilation disc, so I guess the label was supplied with an MP3 version that they decoded to PCM and put on the CD.)
So, just like Ode to Billy Joe – there are some questions here… and you don’t need to know much about digital audio to answer them… But the basic moral of this part of the story is that the format that is used to deliver your music is not a guarantee of higher quality…
Reminder: This is still just the lead-up to the real topic of this series. However, we have to get some basics out of the way first…
In the first posting in this series, I talked about digital audio (more accurately, Linear Pulse Code Modulation or LPCM digital audio) is basically just a string of stored measurements of the electrical voltage that is analogous to the audio signal, which is a change in pressure over time… In the second posting in the series, we looked at a “trick” for dealing with the issue of quantisation (the fact that we have a limited resolution for measuring the amplitude of the audio signal). This trick is to add dither (a fancy word for “noise”) to the signal before we quantise it in order to randomise the error and turn it into noise instead of distortion.
In this posting, we’ll look at some of the problems incurred by the way we carve up time into discrete moments when we grab those samples.
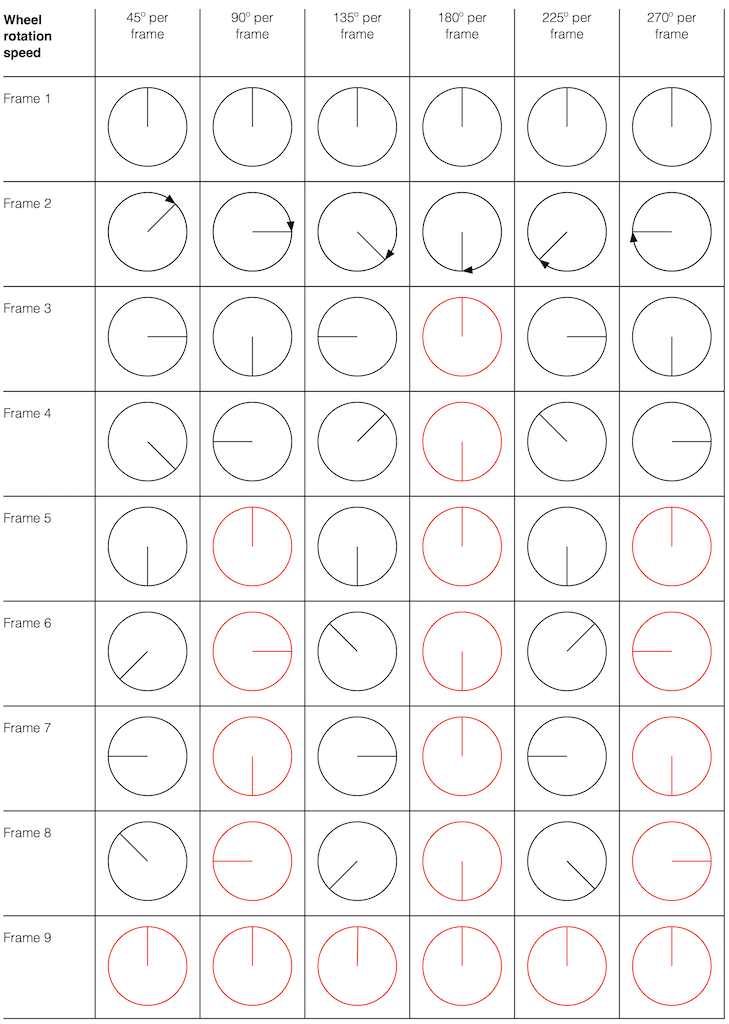
Let’s make a wheel that has one spoke. We’ll rotate it at some speed, and make a film of it turning. We can define the rotational speed in RPM – rotations per minute, but this is not very useful. In this case, what’s more useful is to measure the wheel rotation speed in degrees per frame of the film.
Fig 1. The position of a clockwise-rotating wheel (with only one spoke) for 9 frames of a film. Each column shows a different rotational speed of the wheel. The far left column is the slowest rate of rotation. The far right column is the fastest rate of rotation. Red wheels show the frame in which the sequence starts repeating.
Take a look at the left-most column in Figure 1. This shows the wheel rotating 45º each frame. If we play back these frames, the wheel will look like it’s rotating 45º per frame. So, the playback of the wheel rotating looks the same as it does in real life.
This is more or less the same for the next two columns, showing rotational speeds of 90º and 135º per frame.
However, things change dramatically when we look at the next column – the wheel rotating at 180º per frame. Think about what this would look like if we played this movie (assuming that the frame rate is pretty fast – fast enough that we don’t see things blinking…) Instead of seeing a rotating wheel with only one spoke, we would see a wheel that’s not rotating – and with two spokes.
This is important, so let’s think about this some more. This means that, because we are cutting time into discrete moments (each frame is a “slice” of time) and at a regular rate (I’m assuming here that the frame rate of the film does not vary), then the movement of the wheel is recorded (since our 1 spoke turns into 2) but the direction of movement does not. (We don’t know whether the wheel is rotating clockwise or counter-clockwise. Both directions of rotation would result in the same film…)
Now, let’s move over one more column – where the wheel is rotating at 225º per frame. In this case, if we look at the film, it appears that the wheel is back to having only one spoke again – but it will appear to be rotating backwards at a rate of 135º per frame. So, although the wheel is rotating clockwise, the film shows it rotating counter-clockwise at a different (slower) speed. This is an effect that you’ve probably seen many times in films and on TV. What may come as a surprise is that this never happens in “real life” unless you’re in a place where the lights are flickering at a constant rate (as in the case of fluorescent or some LED lights, for example).
Again, we have to consider the fact that if the wheel actually were rotating counter-clockwise at 135º per frame, we would get exactly the same thing on the frames of the film as when the wheel if rotating clockwise at 225º per frame. These two events in real life will result in identical photos in the film. This is important – so if it didn’t make sense, read it again.
This means that, if all you know is what’s on the film, you cannot determine whether the wheel was going clockwise at 225º per frame, or counter-clockwise at 135º per frame. Both of these conclusions are valid interpretations of the “data” (the film). (Of course, there are more – the wheel could have rotated clockwise by 360º+225º = 585º or counter-clockwise by 360º+135º = 495º, for example…)
Since these two interpretations of reality are equally valid, we call the one we know is wrong an alias of the correct answer. If I say “The Big Apple”, most people will know that this is the same as saying “New York City” – it’s an alias that can be interpreted to mean the same thing.
Wheels and Slinkies
We people in audio commit many sins. One of them is that, every time we draw a plot of anything called “audio” we start out by drawing a sine wave. (A similar sin is committed by musicians who, at the first opportunity to play a grand piano, will play a middle-C, as if there were other notes in the world.) The question is: what, exactly, is a sine wave?
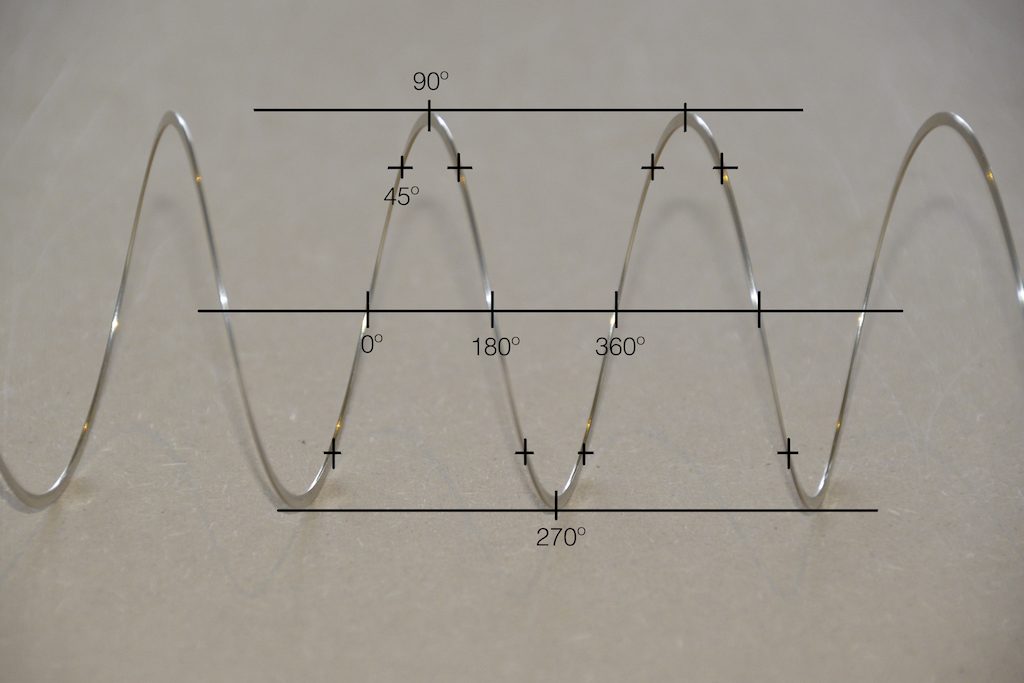
Get a Slinky – or if you don’t want to spend money on a brand name, get a spring. Look at it from one end, and you’ll see that it’s a circle, as can be (sort of) seen in Figure 2.
Fig 2. A Slinky, seen from one end. If I had really lined things up, this would just look like a shiny circle.
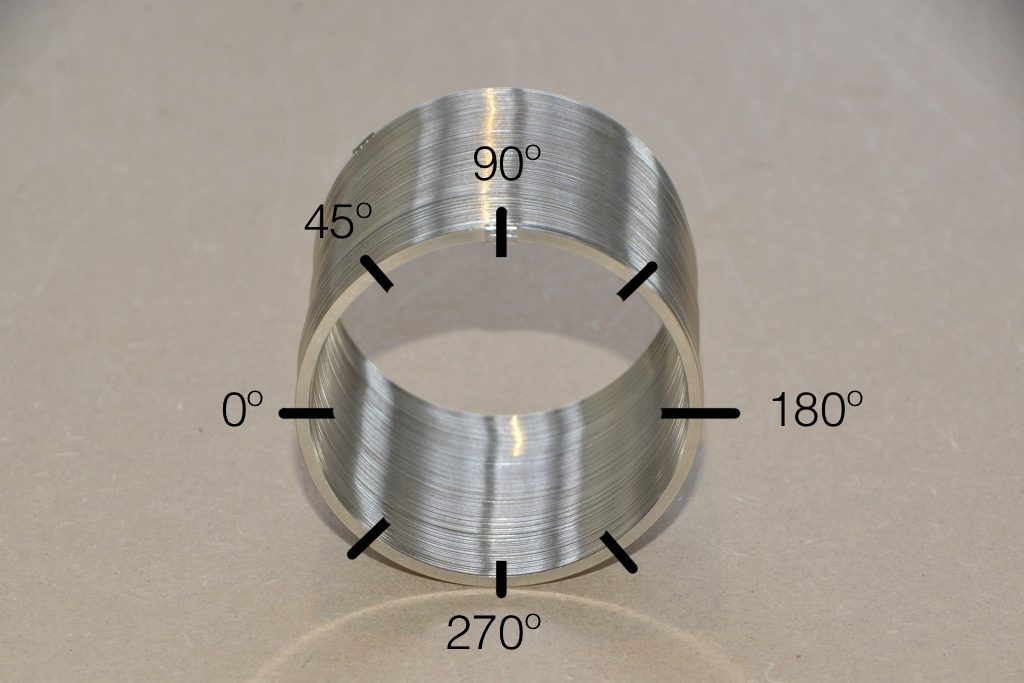
Since this is a circle, we can put marks on the Slinky at various amounts of rotation, as in Figure 3.
Fig 3. The same Slinky, marked in increasing angles of 45º.
Of course, I could have put the 0º marl anywhere. I could have also rotated counter-clockwise instead of clockwise. But since both of these are arbitrary choices, I’m not going to debate either one.
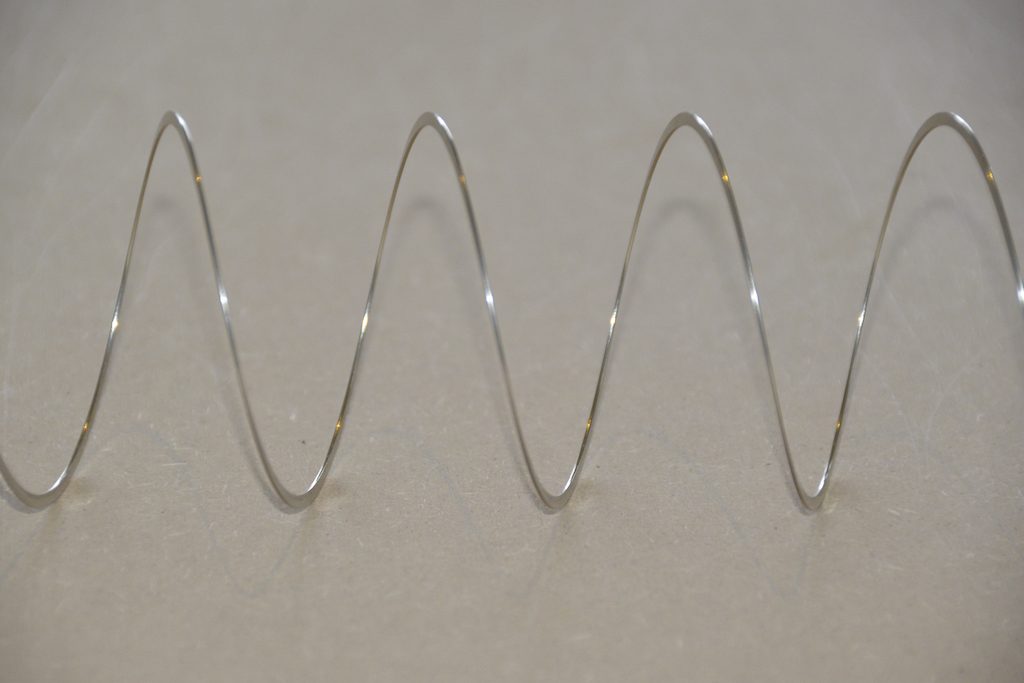
Now, let’s rotate the Slinky so that we’re looking at from the side. We’ll stretch it out a little too…
Fig 4. The same Slinky, stretched a little, and viewed from the side.
Let’s do that some more…
Fig 5. The same Slinky, stretched more, and viewed from the “side” (in a direction perpendicular to the axis of the rotation).
When you do this, and you look at the Slinky directly from one side, you are able to see the vertical change of the spring from the centre as a result of the change in rotation. For example, we can see in Figure 6 that, if you mark the 45º rotation point in this view, the distance from the centre of the spring is 71% of the maximum height of the spring (at 90º).
Fig 6. The same markings shown in Figure 3, when looking at the Slinky from the side. Note that, if we didn’t have the advantage of a little perspective (and a spring made of flat metal), we would not know whether the 0º point was closer or further away from us than the 180º point. In other words, we wouldn’t know if the Slinky was rotating clockwise or counter-clockwise.
So what? Well, basically, the “punch line” here is that a sine wave is actually a “side view” of a rotation. So, Figure 7, shows a measurement – a capture – of the amplitude of the signal every 45º.
Fig 7. Each measurement (a black “lollipop”) is a measurement of the vertical change of the signal as a result of rotating 45º.
Since we can now think of a sine wave as a rotation of a circle viewed from the side, it should be just a small leap to see that Figure 7 and the left-most column of Figure 1 are basically identical.
Let’s make audio equivalents of the different columns in Figure 1.
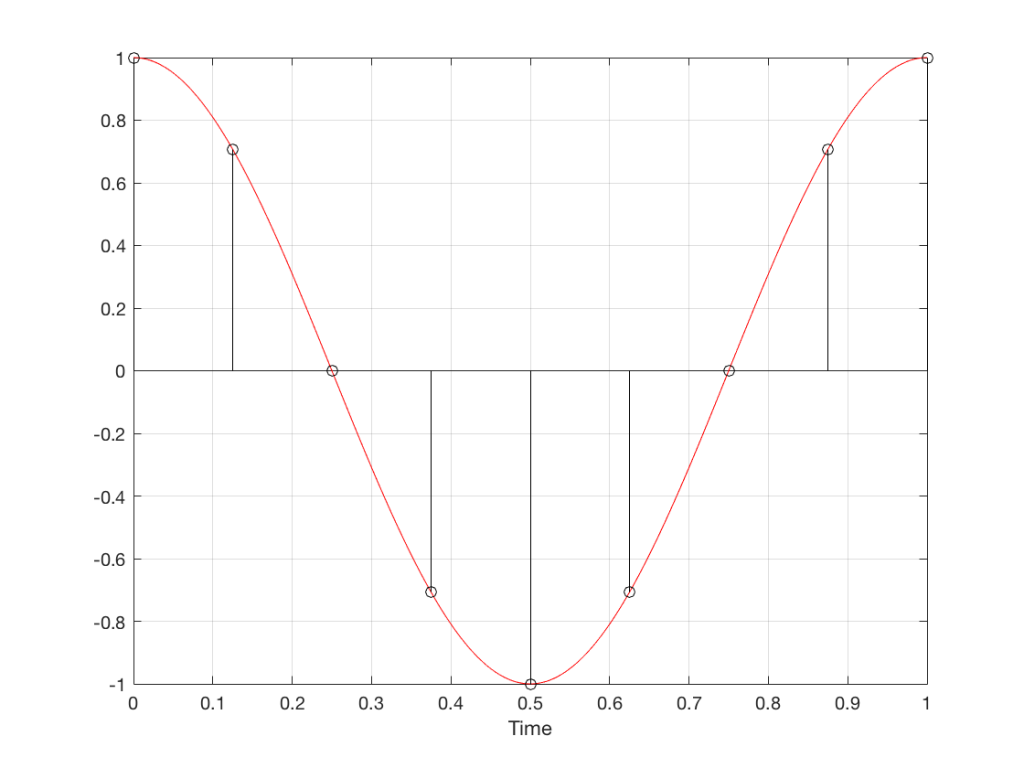
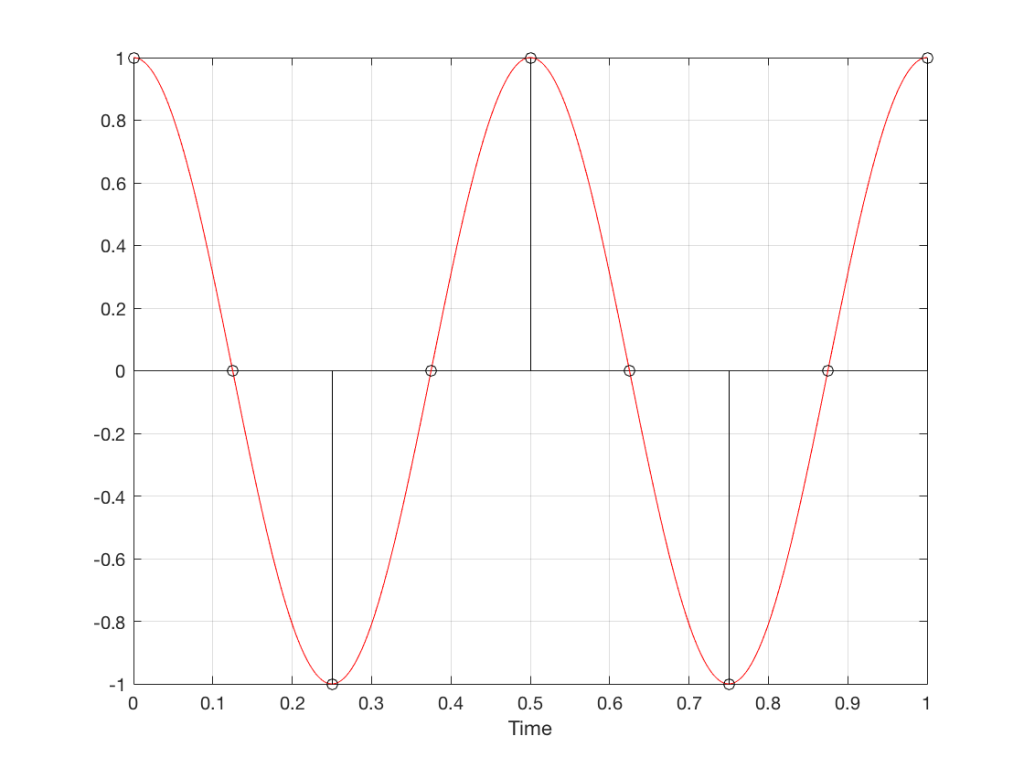
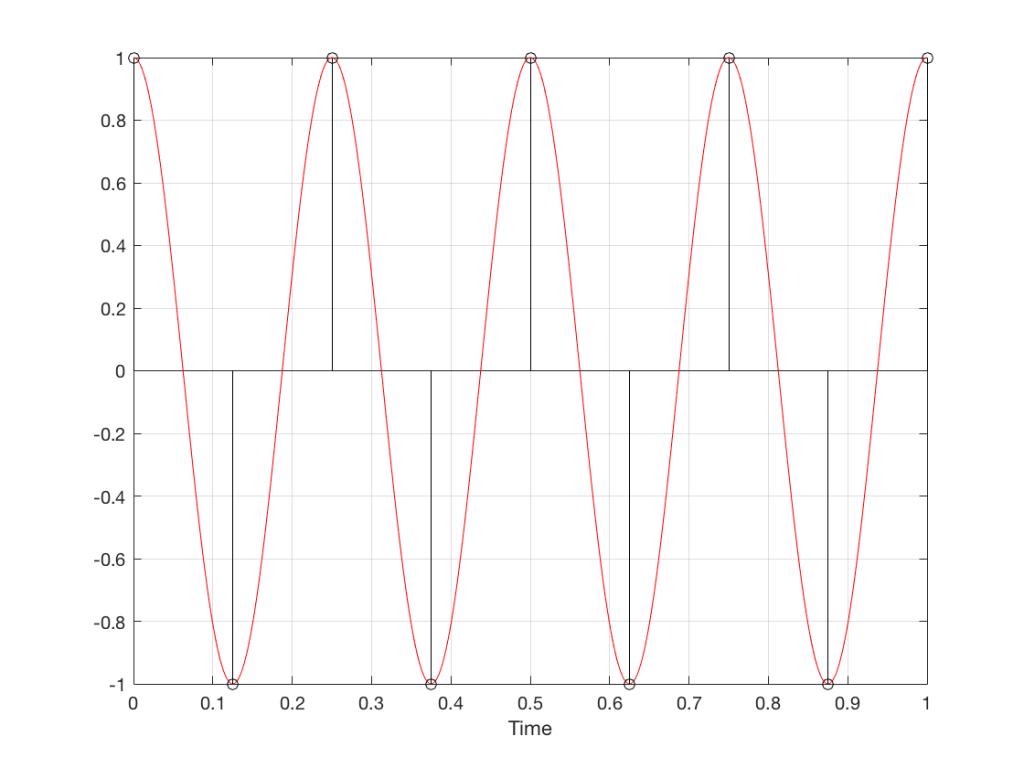
Fig 8. A sampled cosine wave where the frequency of the signal is equivalent to 90º per sample period. This is identical to the “90º per frame” column in Figure 1.Fig 9. A sampled cosine wave where the frequency of the signal is equivalent to 135º per sample period. This is identical to the “135º per frame” column in Figure 1.Fig 10. A sampled cosine wave where the frequency of the signal is equivalent to 180º per sample period. This is identical to the “180º per frame” column in Figure 1.
Figure 10 is an important one. Notice that we have a case here where there are exactly 2 samples per period of the cosine wave. This means that our sampling frequency (the number of samples we make per second) is exactly one-half of the frequency of the signal. If the signal gets any higher in frequency than this, then we will be making fewer than 2 samples per period. And, as we saw in Figure 1, this is where things start to go haywire.
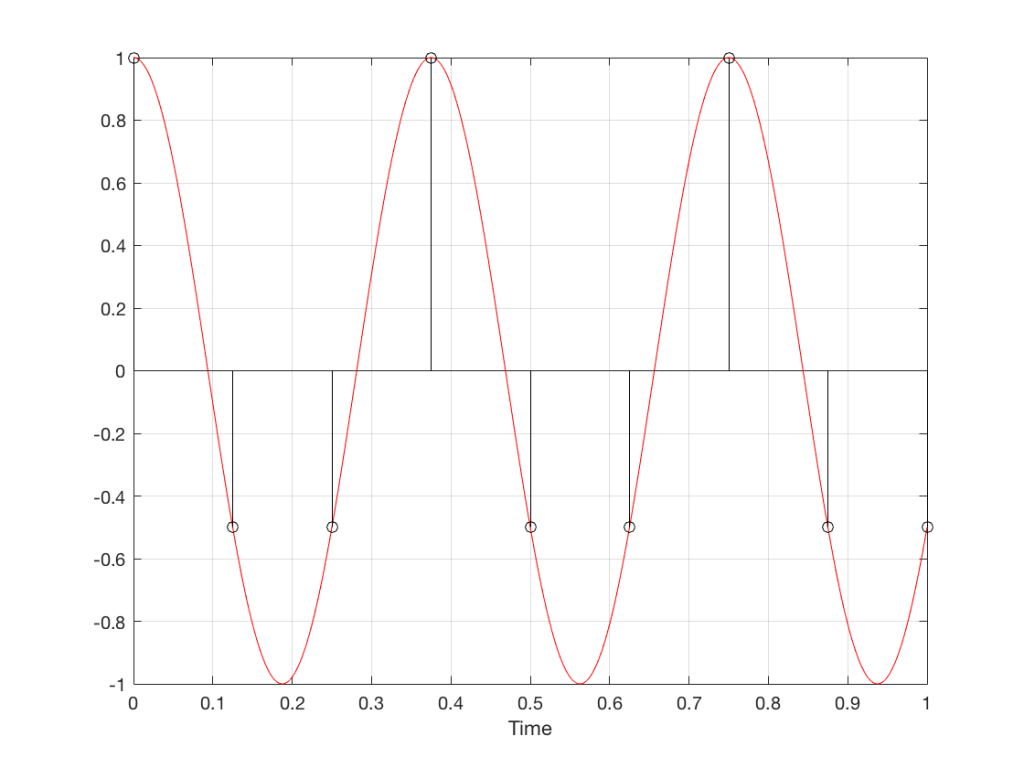
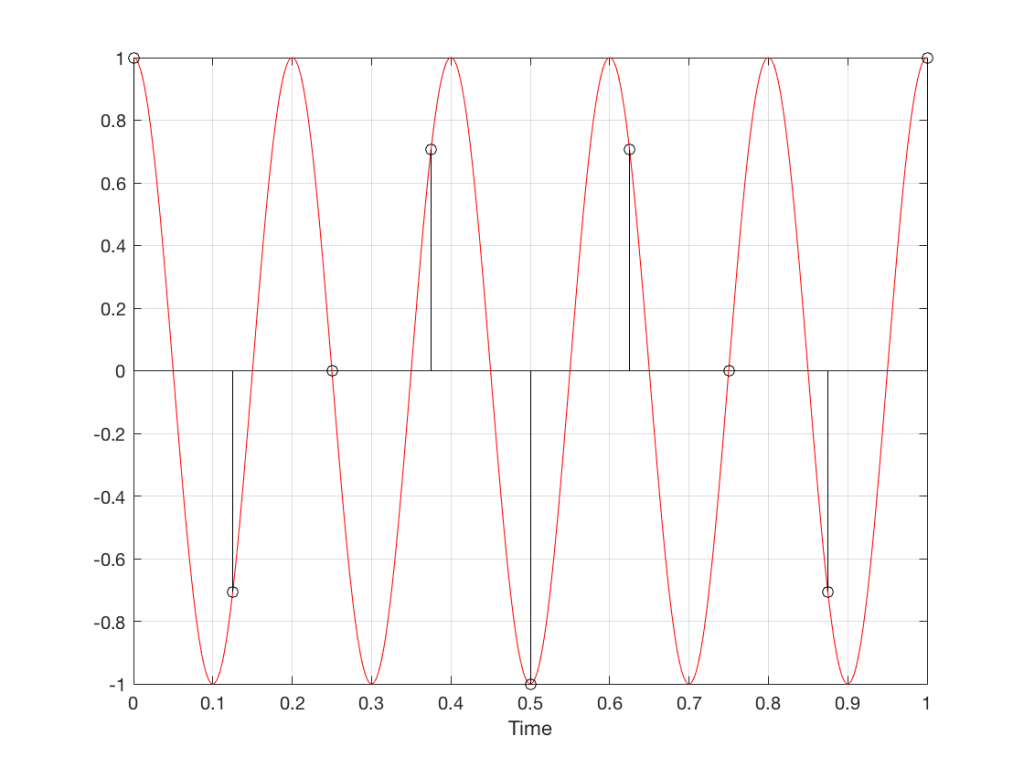
Fig 11. A sampled cosine wave where the frequency of the signal is equivalent to 225º per sample period. This is identical to the “225º per frame” column in Figure 1.
Figure 11 shows the equivalent audio case to the “225º per frame” column in Figure 1. When we were talking about rotating wheels, we saw that this resulted in a film that looked like the wheel was rotating backwards at the wrong speed. The audio equivalent of this “wrong speed” is “a different frequency” – the alias of the actual frequency. However, we have to remember that both the correct frequency and the alias are valid answers – so, in fact, both frequencies (or, more accurately, all of the frequencies) exist in the signal.
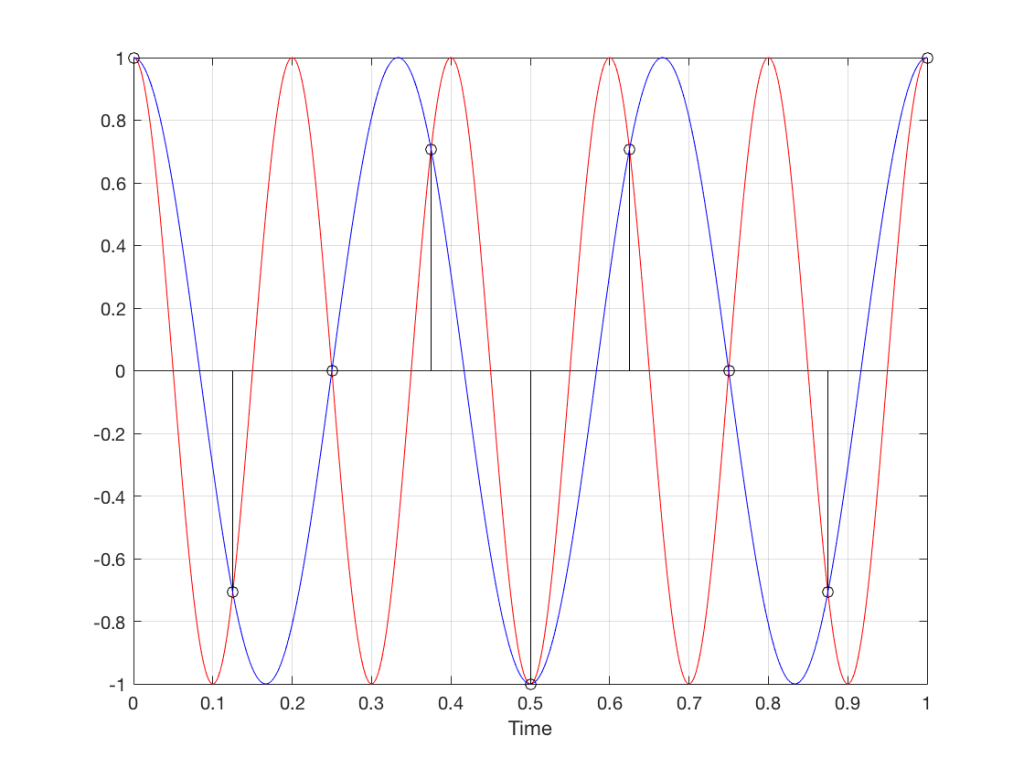
So, we could take Fig 11, look at the samples (the black lollipops) and figure out what other frequency fits these. That’s shown in Figure 12.
Fig 12. The red signal and the black samples of it are the same as was shown in Figure 11. However, another frequency (the blue signal) also fits those samples. So, both the red signal and the blue signal exist in our system.
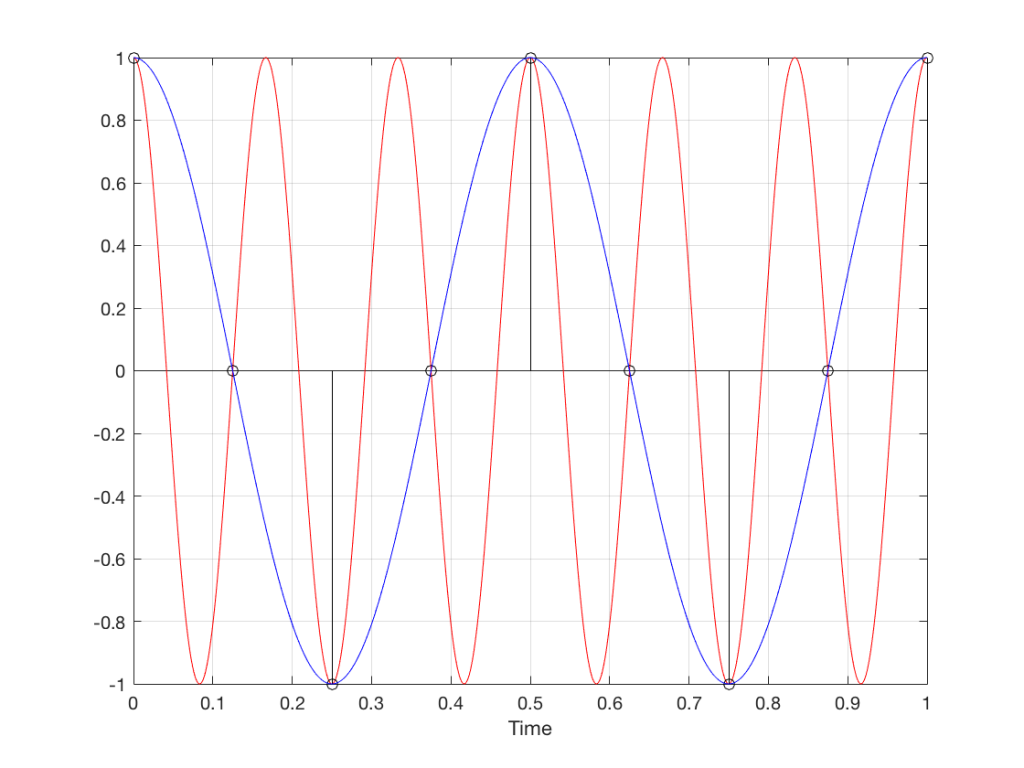
Moving up in frequency one more step, we get to the right-hand column in Figure 1, whose equivalent, including the aliased signal, are shown in Figure 13.
Fig 13. A signal (the red curve) that has a frequency equivalent to 280º of rotation per sample, its samples (the black lollipops) and the aliased additional signal that results (the blue curve).
Do I need to worry yet?
Hopefully, now, you can see that an LPCM system has a limit with respect to the maximum frequency that it can deal with appropriately. Specifically, the signal that you are trying to capture CANNOT exceed one-half of the sampling rate. So, if you are recording a CD, which has a sampling rate of 44,100 samples per second (or 44.1 kHz) then you CANNOT have any audio signals in that system that are higher than 22,050 Hz.
That limit is commonly known as the “Nyquist frequency“, named after Harry Nyquist – one of the persons who figured out that this limit exists.
In theory, this is always true. So, when someone did the recording destined for the CD, they made sure that the signal went through a low-pass filter that eliminated all signals above the Nyquist frequency.
In practice, however, there are many cases where aliasing occurs in digital audio systems because someone wasn’t paying enough attention to what was happening “under the hood” in the signal processing of an audio device. This will come up later.
Two more details to remember…
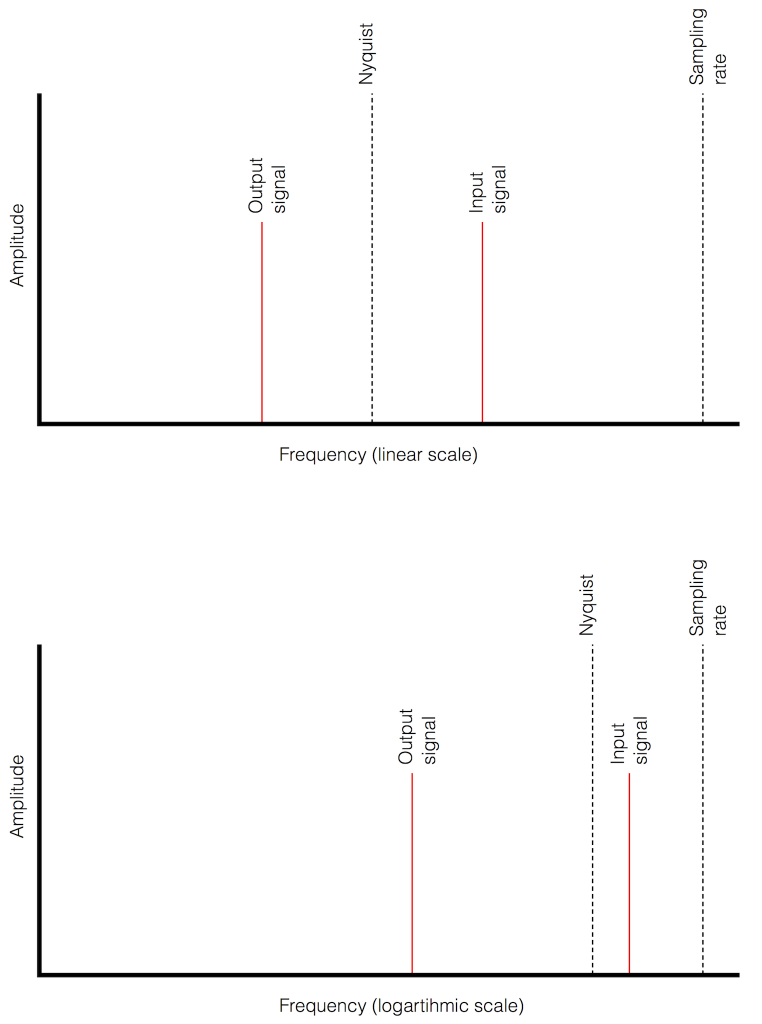
There’s an easy way to predict the output of a system that’s suffering from aliasing if your input is sinusoidal (and therefore contains only one frequency). The frequency of the output signal will be the same distance from the Nyquist frequency as the frequency if the input signal. In other words, the Nyquist frequency is like a “mirror” that “reflects” the frequency of the input signal to another frequency below Nyquist.
This can be easily seen in the upper plot of Figure 14. The distance from the Input signal and the Nyquist is the same as the distance between the output signal and the Nyquist.
Also, since that Nyquist frequency acts as a mirror, then the Input and output signal’s frequencies will move in opposite directions (this point will help later).
Fig 14. Two plots showing the same information about an Input Signal above the Nyquist frequency and the output alias signal. Notice that, in the linear plot on top, it’s easier to see that the Nyquist frequency is the mirror point at the centre of the frequencies of the Input and Output signals.
Usually, frequency-domain plots are done on a logarithmic scale, because this is more intuitive for we humans who hear logarithmically. (For example, we hear two consecutive octaves on a piano as having the same “interval” or “width”. We don’t hear the width of the upper octave as being twice as wide, like a measurement system does. that’s why music notation does not get wider on the top, with a really tall treble clef.) This means that it’s not as obvious that the Nyquist frequency is in the centre of the frequencies of the input signal and its alias below Nyquist.
Reminder: This is still just the lead-up to the real topic of this series. However, we have to get some basics out of the way first…
In the last posting, I talked about digital audio (more accurately, Linear Pulse Code Modulation or LPCM digital audio) is basically just a string of stored measurements of the electrical voltage that is analogous to the audio signal, which is a change in pressure over time…
For now, we’ll say that each measurement is rounded off to the nearest possible “tick” on the ruler that we’re using to measure the voltage. That rounding results in an error. However, (assuming that everything is working correctly) that error can never be bigger than 1/2 of a “step”. Therefore, in order to reduce the amount of error, we need to increase the number of ticks on the ruler.
Now we have to introduce a new word. If we really had a ruler, we could talk about whether the ticks are 1 mm apart – or 1/16″ – or whatever. We talk about the resolution of the ruler in terms of distance between ticks. However, if we are going to be more general, we can talk about the distance between two ticks being one “quantum” – a fancy word for the smallest step size on the ruler.
So, when you’re “rounding off to the nearest value” you are “quantising” the measurement (or “quantizing” it, if you live in Noah Webster’s country and therefore you harbor the belief that wordz should be spelled like they sound – and therefore the world needz more zees). This also means that the amount of error that you get as a result of that “rounding off” is called “quantisation error“.
In some explanations of this problem, you may read that this error is called “quantisation noise”. However, this isn’t always correct. This is because if something is “noise” then is is random, and therefore impossible to predict. However, that’s not strictly the case for quantisation error. If you know the signal, and you know the quantisation values, then you’ll be able to predict exactly what the error will be. So, although that error might sound like noise, technically speaking, it’s not. This can easily be seen in Figures 1 through 3 which demonstrate that the quantisation error causes a periodic, predictable error (and therefore harmonic distortion), not a random error (and therefore noise).
Sidebar: The reason people call it quantisation noise is that, if the signal is complicated (unlike a sine wave) and high in level relative to the quantisation levels – say a recording of Britney Spears, for example – then the distortion that is generated sounds “random-ish”, which causes people to just to the conclusion that it’s noise.
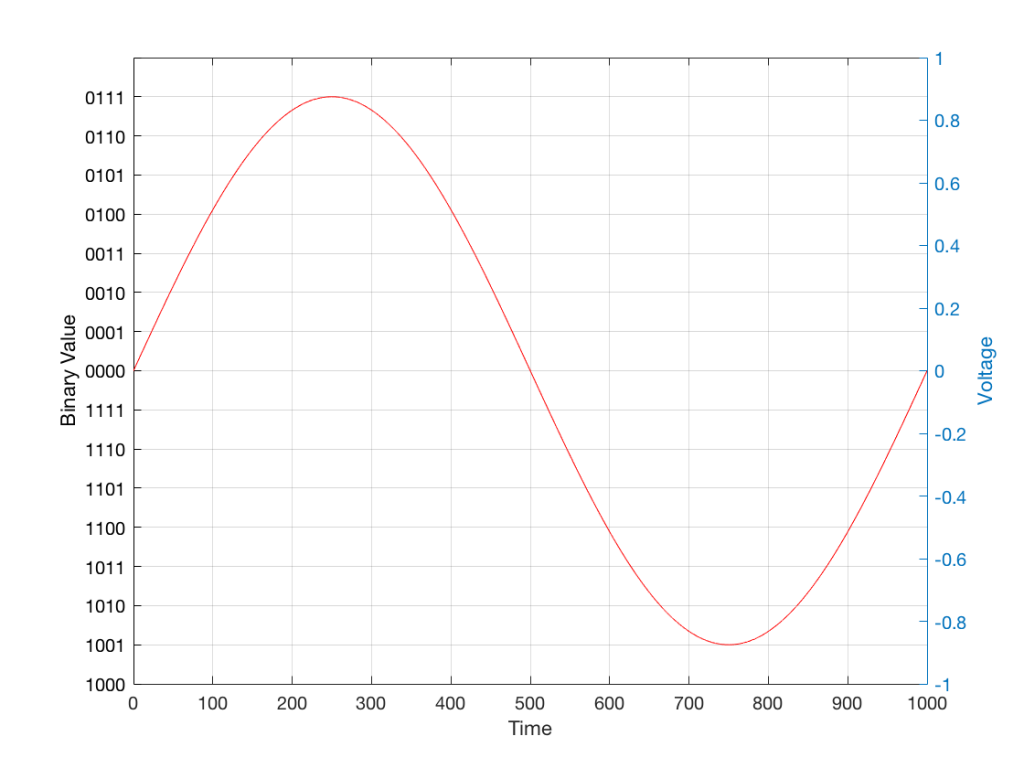
Fig 1: The first cycle of a periodic signal (in this case, a sinusoidal waveform) that we are going to quantise using a 4-bit system (notice the 4 bits in the scale on the left).
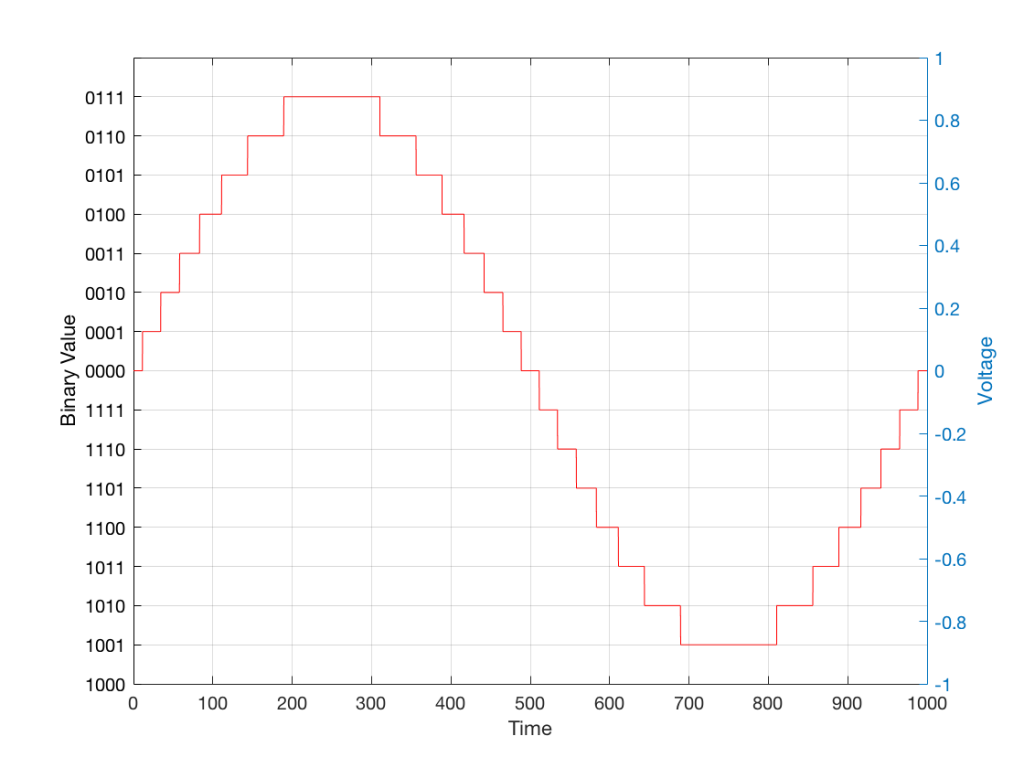
Fig 2: The same waveform shown in Figure 1 after quantisation (rounding off) in a 4-bit world.
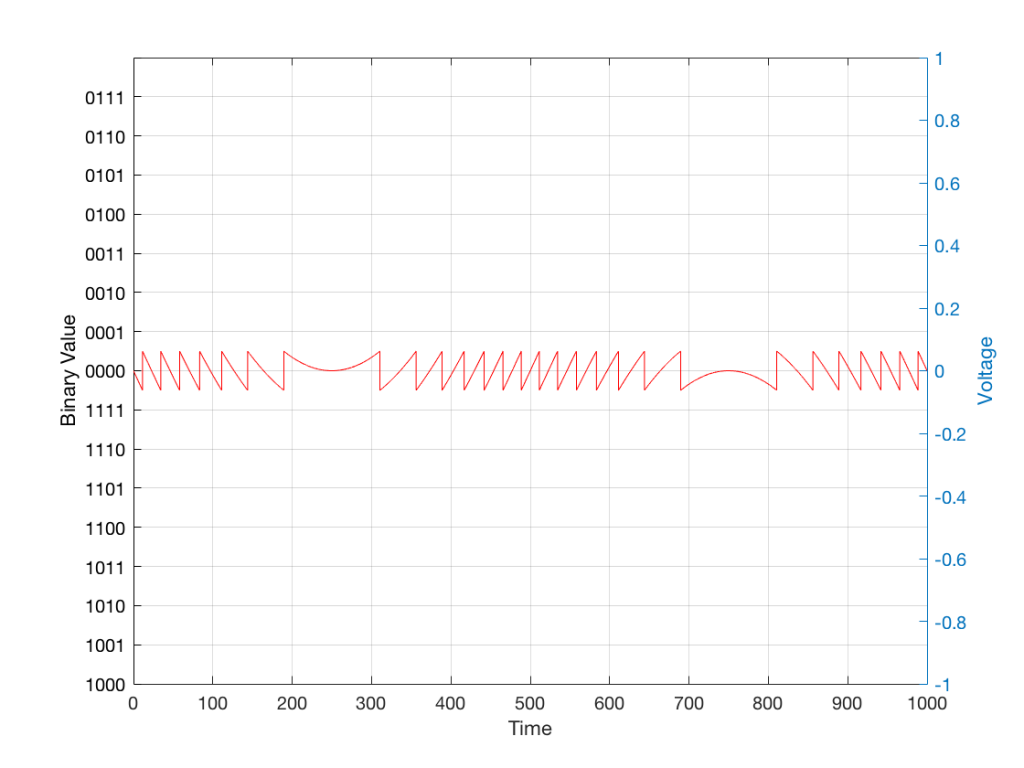
Fig 3: The difference between Figure 2 and Figure 1. I made this by subtracting the original signal from the quantised version. This is the error in the quantised waveform – the quantisation error. Notice that it is not noise… it’s completely predictable and it will repeat with repetitions of the signal. Therefore the result of this is distortion, not noise…
Now, let’s talk about perception for a while… We humans are really good at detecting patterns – signals – in an otherwise noisy world. This is just as true with hearing as it is with vision. So, if you have a sound that exists in a truly random background noise, then you can focus on listening to the sound and ignore the noise. For example, if you (like me) are old enough to have used cassette tapes, then you can remember listening to songs with a high background noise (the “tape hiss”) – but it wasn’t too annoying because the hiss was independent of the music, and constant. However, if you, like me, have listened to Bob Marley’s live version of “No Woman No Cry” from the “Legend” album, then you, like me, would miss the the feedback in the PA system at that point in the song when the FoH engineer wasn’t paying enough attention… That noise (the howl of the feedback) is not noise – it’s a signal… Which makes it just as important as the song itself. (I could get into a long boring talk about John Cage at this point, but I’ll try to not get too distracted…)
The problem with the signal in Figure 2 is that the error (shown in Figure 3) is periodic – it’s a signal that demands attention. If the signal that I was sending into the quantisation system (in Figure 1) was a little more complicated than a sine wave – say a sine wave with an amplitude modulation – then the error would be easily “trackable” by anyone who was listening.
So, what we want to do is to quantise the signal (because we’re assuming that we can’t make a better “ruler”) but to make the error random – so it is changed from distortion to noise. We do this by adding noise to the signal before we quantise it. The result of this is that the error will be randomised, and will become independent of the original signal… So, instead of a modulating signal with modulated distortion, we get a modulated signal with constant noise – which is easier for us to ignore. (It has the added benefit of spreading the frequency content of the error over a wide frequency band, rather than being stuck on the harmonics of the original signal… but let’s not talk about that…)
For example…
Let’s take a look at an example of this from an equivalent world – digital photography.
The photo in Figure 4 is a black and white photo – which actually means that it’s comprised of shades of gray ranging from black all the way to white. The photo has 272,640 individual pixels (because it’s 640 pixels wide and 426 pixels high). Each of those pixels is some shade of gray, but that shading does not have an infinite resolution. There are “only” 256 possible shades of gray available for each pixel.
So, each pixel has a number that can range from 0 (black) up to 255 (white).
Fig 4: A photo of a building in Paris. Each pixel in this photo has one of 256 possible levels of gray – from white (255) down to black (0).
If we were to zoom in to the top left corner of the photo and look at the values of the 64 pixels there (an 8×8 pixel square), you’d see that they are:
What if we were to reduce the available resolution so that there were fewer shades of gray between white and black? We can take the photo in Figure 1 and round the value in each pixel to the new value. For example, Figure 5 shows an example of the same photo reduced to only 4 levels of gray.
Fig 5: The same photo of the same building. Each pixel in this photo has one of 4 possible levels of gray – 255 (white), 170, 85 and 0 (black). Notice that some details are lost – like the smooth transitions in the clouds, or the stripes in the marble in the pillars.
Now, if we look at those same pixels in the upper left corner, we’d see that their values are
They’ve all been quantised to the nearest available level, which is 102. (Our possible values are restricted to 0, 51, 102, 154, 205, and 255).
So, we can see that, by quantising the gray levels from 256 possible values down to only 6, we lose details in the photo. This should not be a surprise… That loss of detail means that, for example, the gentle transition from lighter to darker gray in the sky in the original is “flattened” to a light spot in a darker background, with a jagged edge at the transition between the two. Also, the details of the wall pillars between the windows are lost.
If we take our original photo and add noise to it – so were adding a random value to the value of each pixel in the original photo (I won’t talk about the range of those random values…) it will look like Figure 6. This photo has all 256 possible values of gray – the same as in Figure 1.
Fig 6: Noise. This “photo” has the same number of pixels (640 x 480) as the photo in Figure 4. We add this to the photo before asking the computer to reduce the number of “colours”.
If we then quantise Figure 6 using our 6 possible values of gray, we get Figure 7. Notice that, although we do not have more grays than in Figure 5, we can see things like the gradual shading in the sky and some details in the walls between the tall windows.
Fig 7: The same photo of the same building in Figure 4. Each pixel in this photo ALSO only has one of 6 possible levels of gray – just like in Figure 5. However, this version is the result of quantising the original photo with the noise added before quantisation. The result is admittedly noisy – but we are able to see pattens in the noise that preserve some of the details that we lost in Figure 5.
That noise that we add to the original signal is called dither – because it is forcing the quantiser to be indecisive about which level to quantise to choose.
I should be clear here and say that dither does not eliminate quantisation error. The purpose of dither is to randomise the error, turning the quantisation error into noise instead of distortion. This makes it (among other things) independent of the signal that you’re listening to, so it’s easier for your brain to separate it from the music, and ignore it.
Addendum: Binary basics and SNR
We normally write down our numbers using a “base 10” notation. So, when I write down 9374 – I mean
9 x 1000 + 3 x 100 + 7 x 10 + 4 x 1
or
9 x 103 + 3 x 102 + 7 x 101 + 4 x 100
We use base 10 notation – a system based on 10 digits (0 through 9) because we have 10 fingers.
If we only had 2 fingers, we would do things differently… We would only have 2 digits (0 and 1) and we would write down numbers like this:
11101
which would be the same as saying
1 x 16 + 1 x 8 + 1 x 4 + 0 x 2 + 1 x 1
or
1 x 24 + 1 x 23 + 1 x 22 + 0 x 21 + 1 x 20
The details of this are not important – but one small point is. If we’re using a base-10 system and we increase the number by one more digit – say, going from a 3-digit number to a 4-digit number, then we increase the possible number of values we can represent by a factor of 10. (in other words, there are 10 times as many possible values in the number XXXX than in XXX.)
If we’re using a base-2 system and we increase by one extra digit, we increase the number of possible values by a factor of 2. So XXXX has 2 times as many possible values as XXX.
Now, remember that the error that we generate when we quantise is no bigger than 1/2 of a quantisation step, regardless of the number of steps. So, if we double the number of steps (by adding an extra binary digit or bit to the value that we’re storing), then the signal can be twice as “far away” from the quantisation error.
This means that, by adding an extra bit to the stored value, we increase the potential signal-to-error ratio of our LPCM system by a factor of 2 – or 6.02 dB.
So, if we have a 16-bit LPCM signal, then a sine wave at the maximum level that it can be without clipping is about 6 dB/bit * 16 bits – 3 dB = 93 dB louder than the error. The reason we subtract the 3 dB from the value is that the error is +/- 0.5 of a quantisation step (normally called an “LSB” or “Least Significant Bit”).
Note as well that this calculation is just a rule of thumb. It is neither precise nor accurate, since the details of exactly what kind of error we have will have a minor effect on the actual number. However, it will be close enough.
Once upon a time, when I was a young whipper snapper, studying how to be a recording engineer (which is half of being a tonmeister) I had a textbook on sound recording. There were chapters in there on musical instruments, acoustics, microphones, mixing consoles, magnetic tape, and so on.. There was also a section on something called “digital audio” – but it was a portion of the chapter titled “Noise Reduction”.
Fast-forward a couple of years to 1983 and a new technology hit the market called “Compact Disc” (Here’s a fun fact for impressing people at your next dinner party: The “c” at the end of “disc” means it’s an optical medium. If it were magnetic, it would be a “disk”. So: Compact Disc, but Hard Disk.) Back then, the magazine advertisement read “Perfect Sound. Forever.” Then it hit the real world and the complaints started rolling in from people who believed that they knew things about audio. Some of these complaints were valid, and some were less so… Many of the ones that were valid no longer are, but it’s difficult to un-do a first impression.
Nowadays, it is very likely that almost-all-to-all of the music you listen to has been digital at some point in its life. Even if you’re listening to vinyl, it should not surprise you to know that the master version of the recording you’re hearing was probably stored on a hard disk or passed through a digital mixing console – or at least some of the tracks included some kind of digital processing (say, a guitar pedal or a reverb unit, for example). (I know, I know… There are exceptions. However, if you want to send me anti-digital hate mail you may not do it using a digital communication format such as e-mail. Use an analogue pen to write out your words on a piece of paper and send it to me by post. I look forward to receiving your analogue letters.)
Nowadays, a big part of my “day job” is to test (digital) audio systems to find out what’s wrong with them. So, I thought it would be interesting to do a series of postings that describe the typical kinds of errors that I look for (and find) when I’m digging down into the details.
In order to do this, I’m going to start by being a little redundant and describe the basics of how audio is converted from an analogue signal to a digital one – and hopefully address some of the misconceptions that are associated with this conversion process.
A quick introduction to sound
At the simplest level, sound can be described as a small change in air pressure (or barometric pressure) over short periods of time. If you’d like to have a better and more edu-tain-y version of this statement with animations and pretty colours, you could take 10 minutes to watch this video, for example.
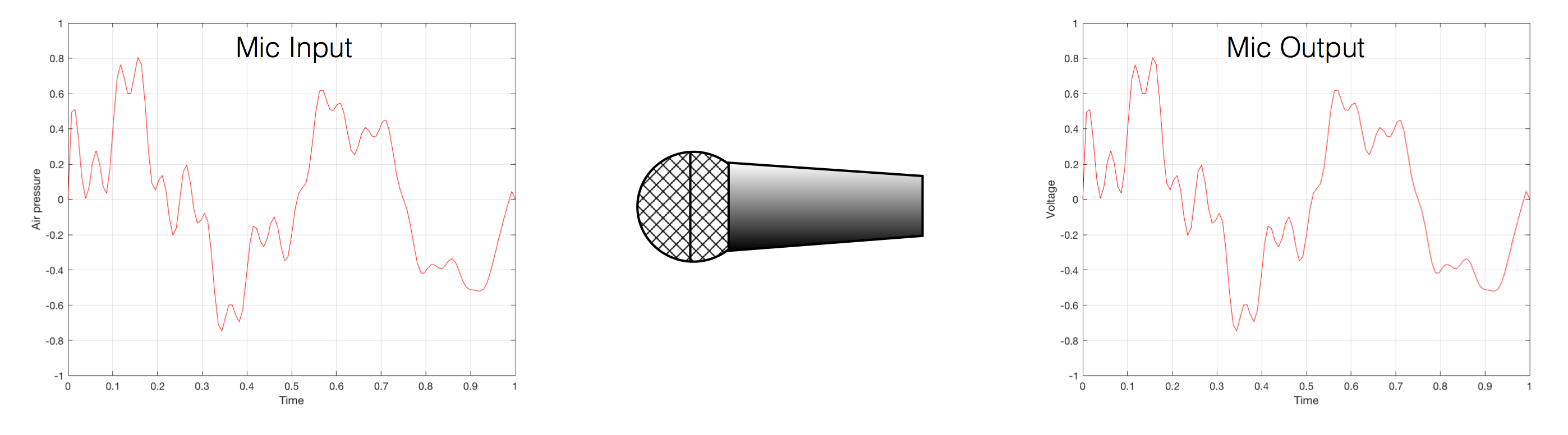
That change in pressure can be “captured” by using a microphone, that is (at the simplest level) a device that has a change in air pressure at its input and a change in electrical voltage at its output. Ignoring a lot of details, we could say that if you were to plot a measurement of the air pressure (at the input of the microphone) over time, and you were to compare it to a plot of the measurement of the voltage (at the output of the microphone) over time, you would see the same curve on the two graphs. This means that the change in voltage is analogous to the change in air pressure.
Fig 1. Notice that (in theory, and ignoring a lot of things…) the change in air pressure over time at the input of the microphone is identical to the change in voltage over time at its output. Of course, this is not true in real life – microphones lie like a cheap rug…
At this point in the conversation, I’ll make a point to say that, in theory, we could “zoom in” on either of those two curves shown in Figure 1 and see more and more details. This is like looking at a map of Canada – it has lots of crinkly, jagged lines. If you zoom in and look at the map of Newfoundland and Labrador, you’ll see that it has finer, crinkly, jagged lines. If you zoom in further, and stand where the water meets the shore in Trepassey and take a photo of your feet, you could copy it to draw a map of the line of where the water comes in around the rocks – and your toes – and you would wind up with even finer, crinkly, jagged lines… You could take this even further and get down to a microscopic or molecular level – but you get the idea… The point is that, in theory, both of the plots in Figure 1 have infinite resolution, both in time and in air pressure or voltage.
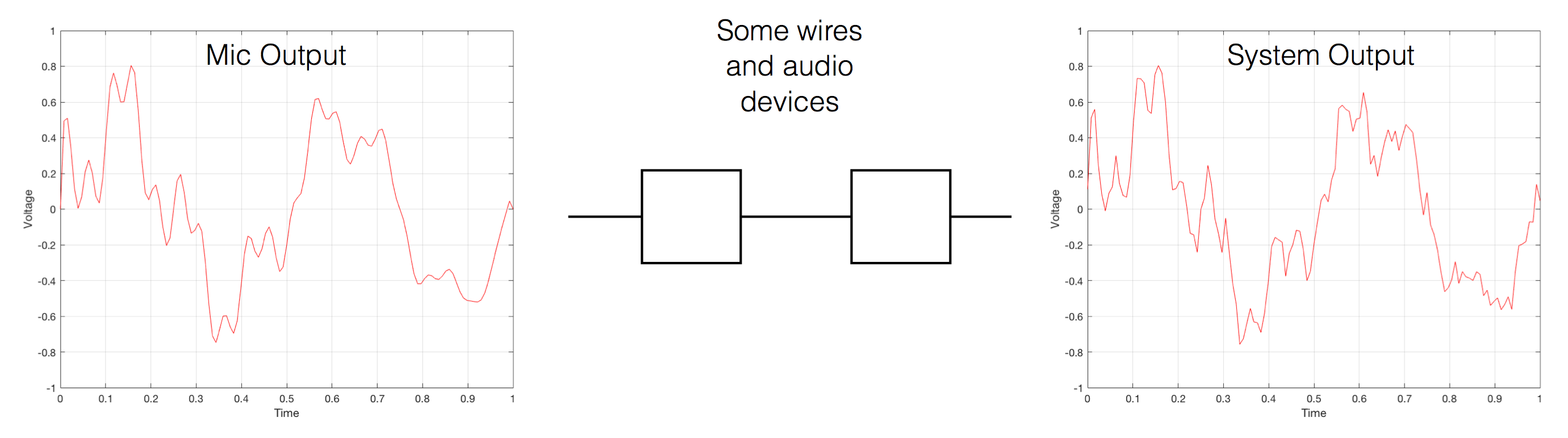
Now, let’s say that you wanted to take that microphone’s output and transmit it through a bunch of devices and wires that, in theory, all do nothing to the signal. Let’s say, for example, that you take the mic’s output, send it through a wire to a box that makes the signal twice as loud. Then take the output of that box and send it through a wire to another box that makes it half as loud. You take the output of that box and send it through a wire to a measuring device. What will you see? Unfortunately, none of the wires or boxes in the chain can be perfect, so you’ll probably see the signal plus something else which we’ll call the “error” in the system’s output. We can call it the error because, if we measure the input voltage and the output voltage at any one instant, we’ll probably see that they’re not identical. Since they should be identical, then the system must be making a mistake in transmitting the signal – so it makes errors…
Fig 2. If you send an audio signal through some wires and devices that (in theory) do nothing to the signal, you’ll find out that they add some extra stuff that you don’t want.
Pedantic Sidebar: Some people will call that error that the system adds to the signal “noise” – but I’m not going to call it that. This is because “noise” is a specific thing – noise is random – so if it’s not random, it’s not noise. Also, although the signal has been distorted (in that the output of the system is not identical to the input) I won’t call it “distortion” either, since distortion is a name that’s given to something that happens to the signal because the signal is there. (We would probably get at least some of the error out of our system even if we didn’t send any audio into it.) So, we could be slightly geeky and adequately vague and call the extra stuff “Distortion plus noise” but not “THD+N” – which stands for “Total Harmonic Distortion Plus Noise” – because not all kinds of distortion will produce a harmonic of the signal… but I’m getting ahead of myself…
So, we want to transmit (or store) the audio signal – but we want to reduce the noise caused by the transmission (or storage) system. One way to do this is to spend more money on your system. Use wires with better shielding, amplifiers with lower noise floors, bigger power supplies so that you don’t come close to their limits, run your magnetic tape twice as fast, and so on and so on. Or, you could convert the analogue signal (remember that it’s analogous to the change in air pressure over time) to one that is represented (and therefore transmitted or stored) digitally instead.
What does this mean?
Conversion from analogue to digital and back
(but skipping important details)
IMPORTANT: If you read this section, then please read the following postings as well. This is because, in order to keep things simple to start, I’m about to leave out some important details that I’ll add afterwards. However, if you don’t add the details, you could (understandably) jump to some incorrect conclusions (that many others before you have concluded…) So, if you don’t have time to read both sections, please don’t read either of them.
In the example above, we made a varying voltage that was analogous to the varying air pressure. If we wanted to store this, we could do it by varying the amount of magnetism on a wire or a coating on a tape, for example. Or we could cut a wiggly groove in a bit of vinyl that has a similar shape to the curve in the plots in Figure 1. Or, we could do something else: we could get a metronome (or a clock) and make a measurement of the voltage every time the metronome clicks, and write down the measurements.
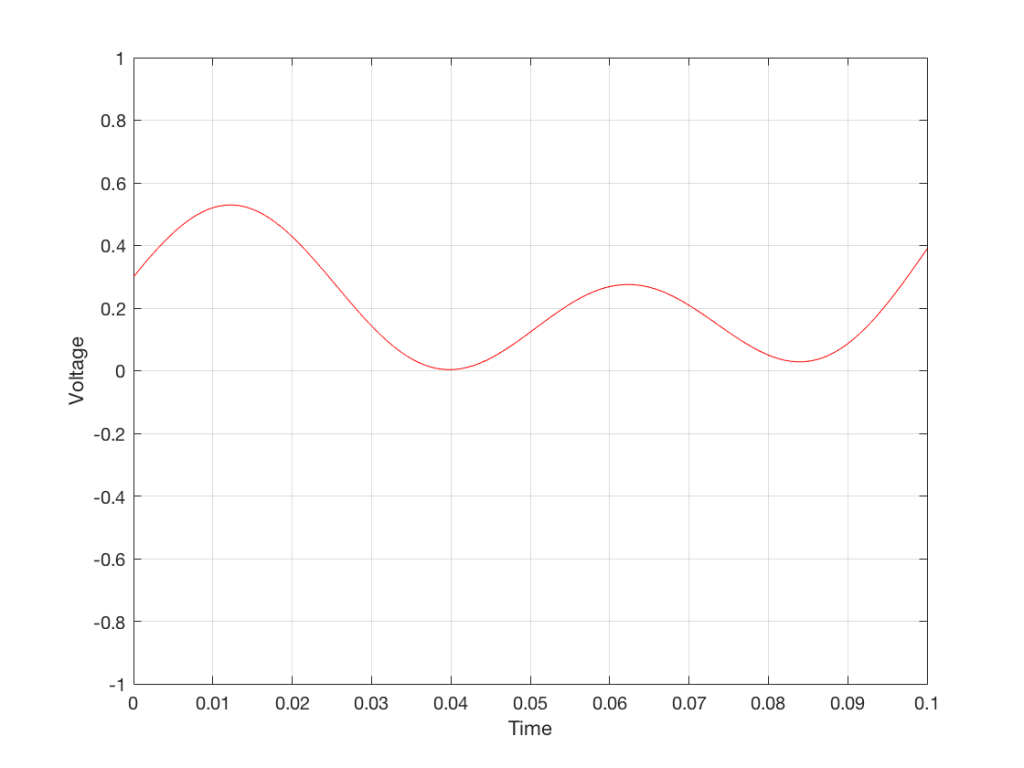
For example, let’s zoom in on the first little bit of the signal in the plots in Figure 1
Fig. 3 The same curve as was shown in Figure 1 – but zoomed in to the very beginning.
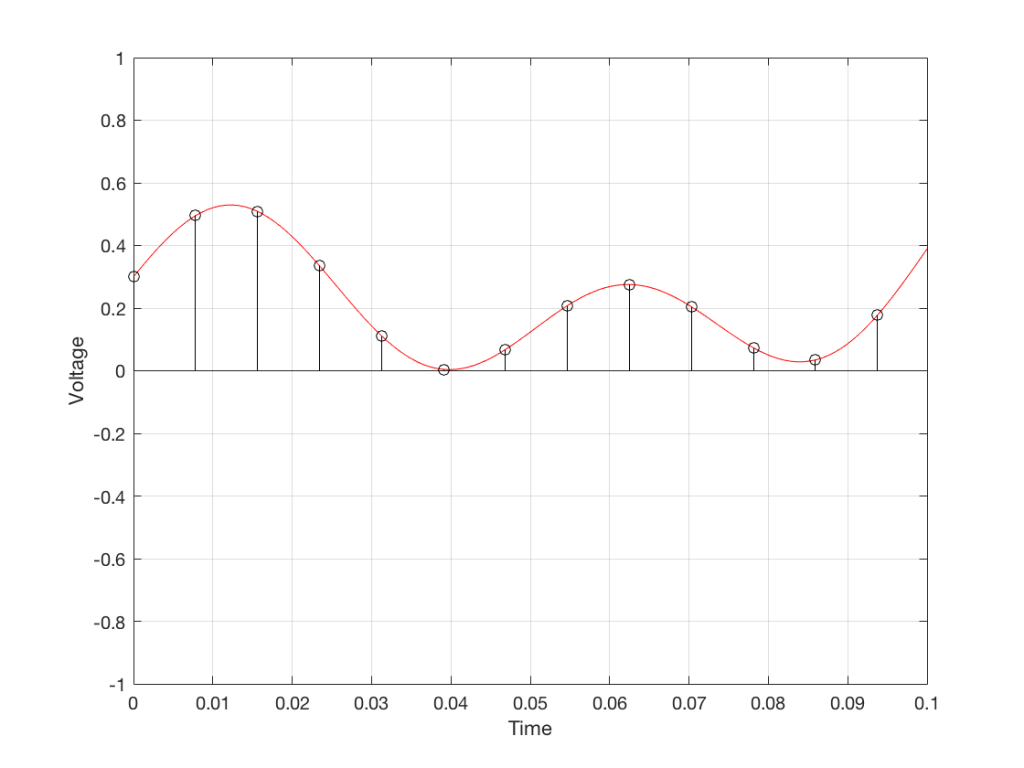
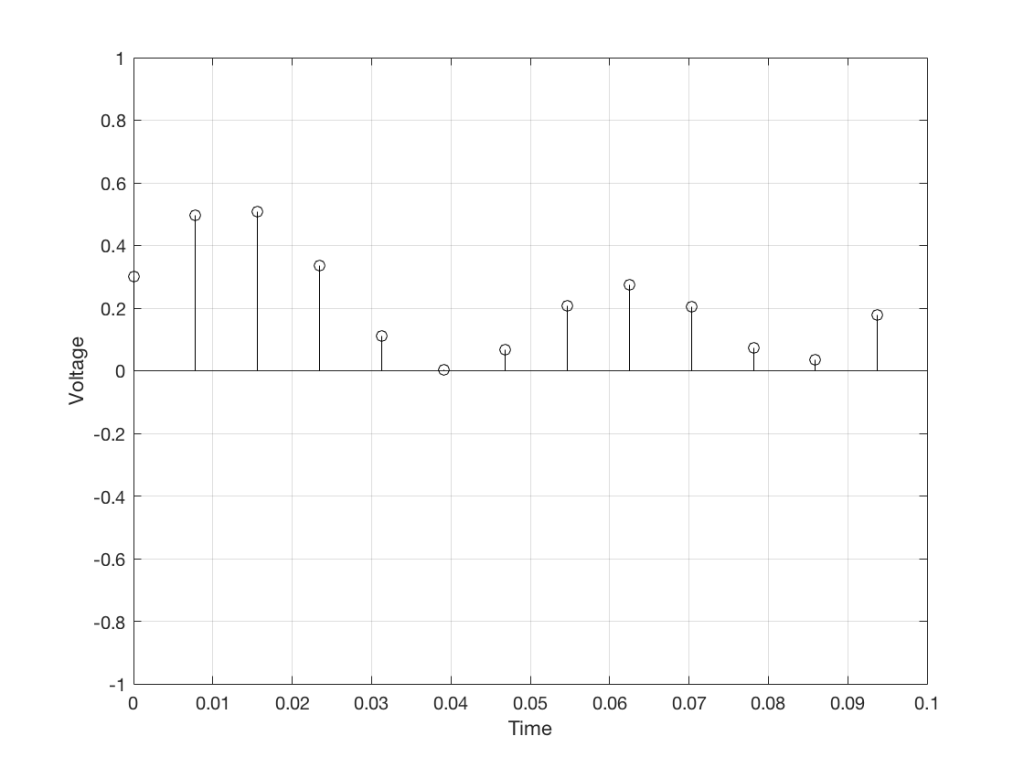
We’ll then put on a metronome and make a measurement of the voltage every time we hear the metronome click…
Fig 4. The same curve (in red) measured at regular intervals (in black)
We can then keep the measurements (remembering how often we made them…) and write them down like this:
We can store this series of numbers on a computer’s hard disk, for example. We can then come back tomorrow, and convert the measurements to voltages. First we read the measurements, and create the appropriate voltage…
Fig. 5. The voltages that we stored as measurements
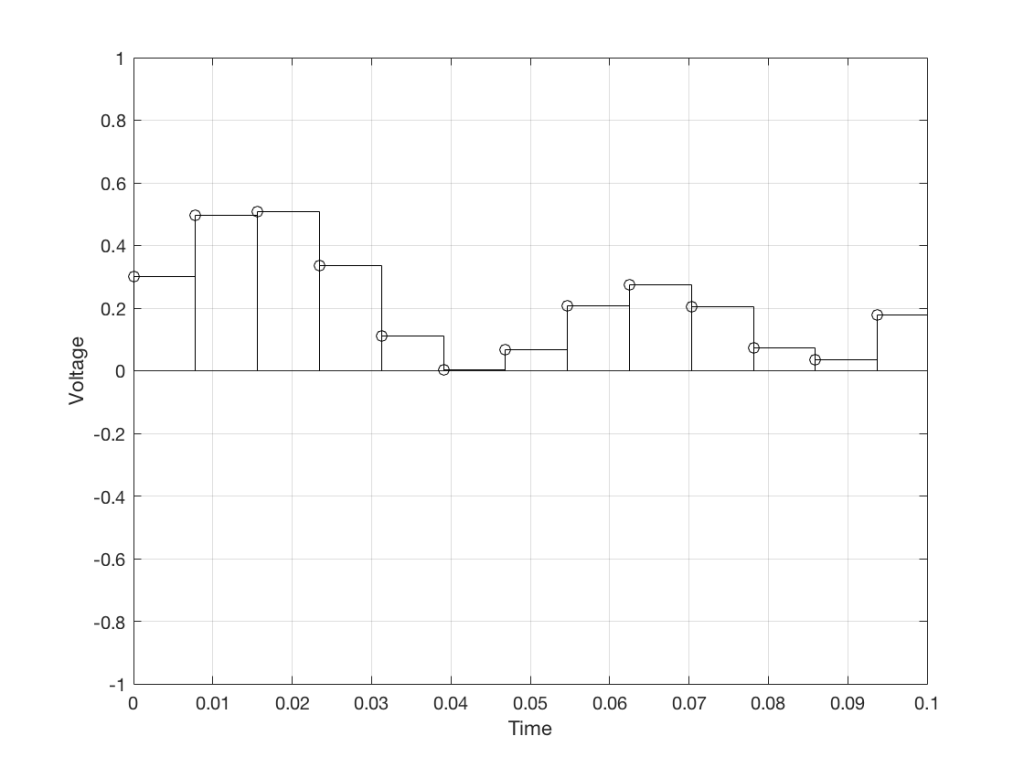
We then make a “staircase” waveform by “holding” those voltages until the next value comes in.
Fig 6. We make a “staircase” curve using the voltages.
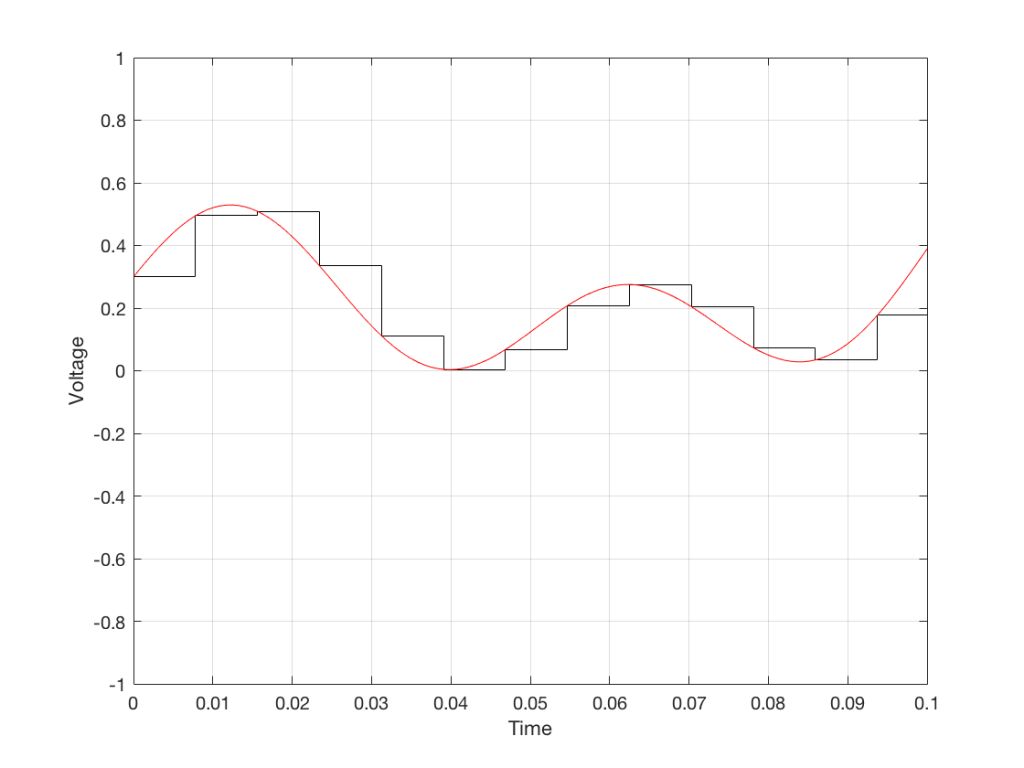
All we need to do then is to use a low-pass filter to smooth out the hard edges of the staircase.
Fig 7. When we smooth out the staircase, we get back the original signal (in red).
So, in this example, we’ve gone from an analogue signal (the red curve in Figure 3) to a digital signal (the series of numbers), and back to an analogue signal (the red curve in Figure 7).
In some ways, this is a bit like the way a movie works. When you watch a movie, you see a series of still photographs, probably taken at a rate of 24 pictures (or frames) per second. If you play those photos back at the same rate (24 fps or frames per second), you think you see movement. However, this is because your eyes and brain aren’t fast enough to see 24 individual photos per second – so you are fooled into thinking that things on the screen are moving.
However, digital audio is slightly different from film in two ways:
The sound (equivalent to the movement in the film) is actually happening. It’s not a trick that relies on your ears and brain being too slow.
If, when you were filming the movie, something were to happen between frames (say, the flash of a gunshot, for example) then it would never be caught on film. This is because the photos are discrete moments in time – and what happens between them is lost. However, if something were to make a very, very short sound between two samples (two measurements) in the digital audio signal – it would not be lost. This is because of something that happens at the beginning of the chain that I haven’t described… yet…
However, there are some “artefacts” (a fancy term for “weird errors”) that are present both in film and in digital audio that we should talk about.
The first is an error that happens when you mess around with the rate at which you take the measurements (called the “sampling rate”) or the photos (called the “frame rate”) – and, more importantly, when you need to worry about this. Let’s say that you make a film at 24 fps. If you play this back at a higher frame rate, then things will move very quickly (like old-fashioned baseball movies…). If you play them back at a lower frame rate, then things move in slow motion. So, for things to look “normal” you have to play the movie at the same rate that it was filmed. However, as longs no one is looking, you can transfer the movie as fast as you like. For example, if you wanted to copy the film, you could set up a movie camera so it was pointing at a movie screen and film the film. As long as the movie on the screen is running in sync with the camera, you can do this at any frame rate you like. But you’ll have to watch the copy at the same frame rate as the original film…
The second is an easy artefact to recognise. If you see a car accelerating from 0 to something fast on film, you’ll see the wheels of the car start to get faster and faster, then, as the car gets faster, the wheels slow down, stop, and then start going backwards… This does not happen in real life (unless you’re in a place lit with flashing lights like fluorescent bulbs or LED’s). I’ll do a posting explaining why this happens – but the thing to remember here is that the speed of the wheel rotation that you see on the film (the one that’s actually captured by the filming…) is not the real rotational speed of the wheel. However, those two rotational speeds are related to each other (and to the frame rate of the film). If you change the real rotational rate or the frame rate, you’ll change the rotational rate in the film. So, we call this effect “aliasing” because it’s a false version (an alias) of the real thing – but it’s always the same alias (assuming you repeat the conditions…) Digital audio can also suffer from aliasing, but in this case, you put in one frequency (which is actually the same as a rotational speed) and you get out another one. This is not the same as harmonic distortion, since the frequency that you get out is due to a relationship between the original frequency and the sampling rate, so the result is almost never a multiple of the input frequency.
Some details that I left out…
One of the things I said above was something like “we measure the voltage and store the results” and the example I gave was a nice series of numbers that only had 4 digits after the decimal point. This statement has some implications that we need to discuss.
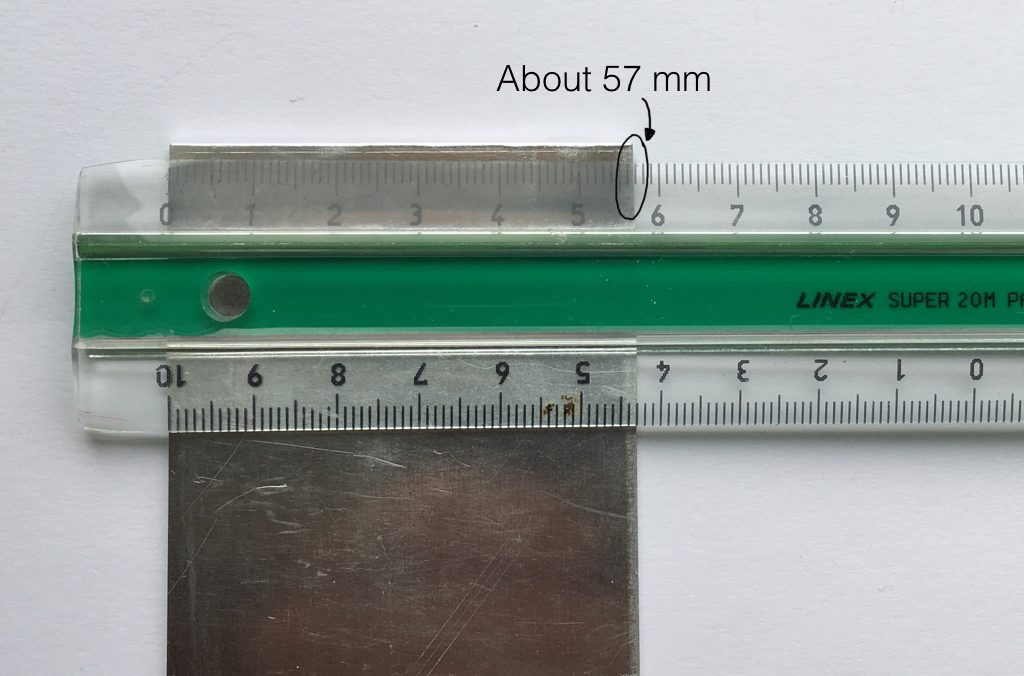
Let’s say that I have a thing that I need to measure. For example, Figure 8 shows a piece of metal, and I want to measure its width.
Fig 8. A piece of metal with a width of “approximately 57 mm”.
Using my ruler, I can see that this piece of metal is about 57 mm wide. However, if I were geeky (and I am) I would say that this is not precise enough – and therefore it’s not accurate. The problem is that my ruler is only graduated in millimetres. So, if I try to measure anything that is not exactly an integer number of mm long, I’ll either have to guess (and be wrong) or round the measurement to the nearest millimetre (and be wrong).
So, if I wanted you to make a piece of metal the same width as my piece of metal, and I used the ruler in Figure 8, we would probably wind up with metal pieces of two different widths. In order to make this better, we need a better ruler – like the one in Figure 9.
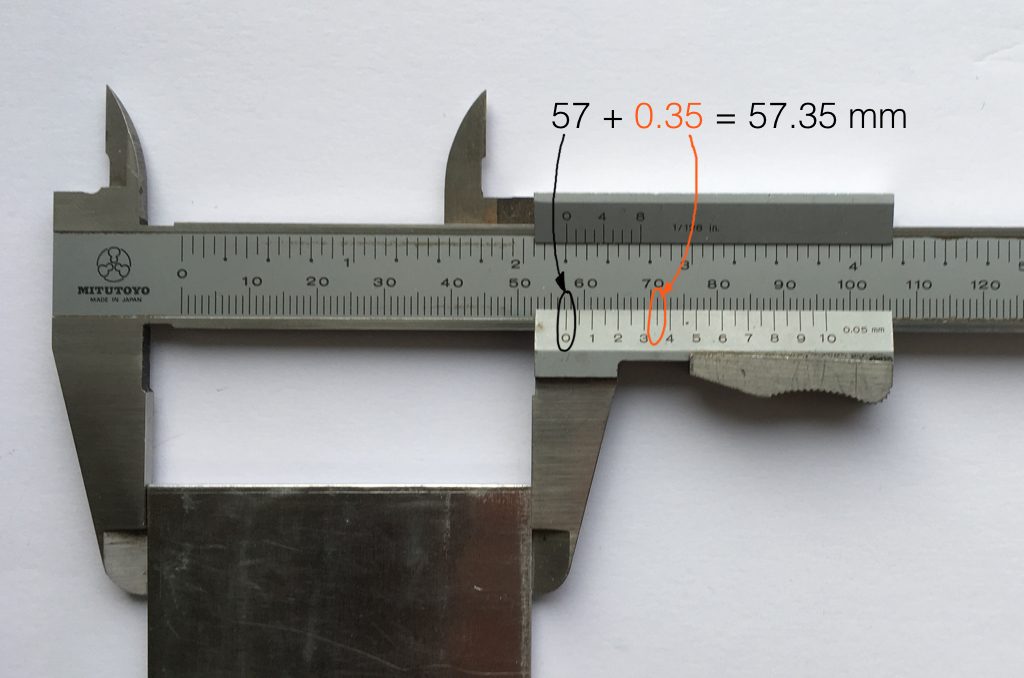
Fig 9. The same piece of metal being measured with a vernier caliper. This gives us additional precision (down to 0.05 mm) so we can make a more accurate measurement.
Figure 9 shows a vernier caliper (a fancy type of ruler) being used to measure the same piece of metal. The caliper has a resolution of 0.05 mm instead of the 1 mm available on the ruler in Figure 8. So, we can make a much more accurate measurement of the metal because we have a measuring device with a higher precision.
The conversion of a digital audio signal is the same. As I said above, we measure the voltage of the electrical signal, and transmit (or store) the measurement. The question is: how accurate and precise is your measurement? As we saw above, this is (partly) determined by how many digits are in the number that you use when you “write down” the measurement.
Since the voltage measurements in digital audio are recorded in binary rather than decimal (we use 0 and 1 to write down the number instead of 0 up to 9) then we use Binary digITS – or “bits” instead of decimal digits (which are not called “dits”). The number of bits we have in the number that we write down (partly) determines the precision of the measurement of the voltage – and therefore (possibly), our accuracy…
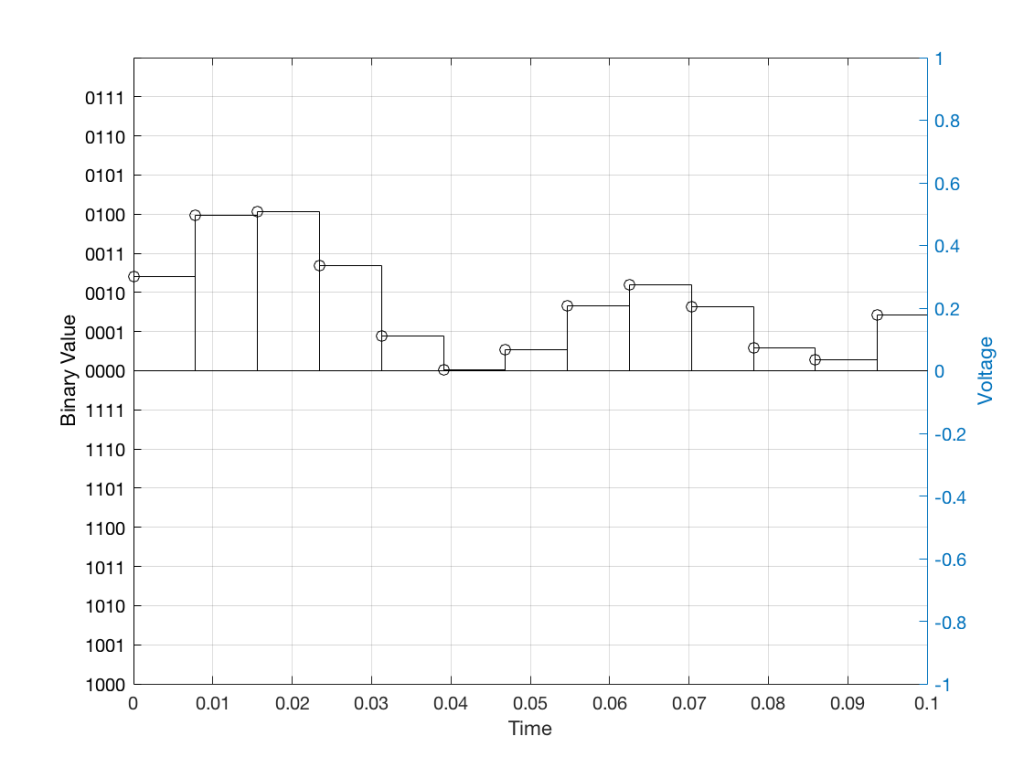
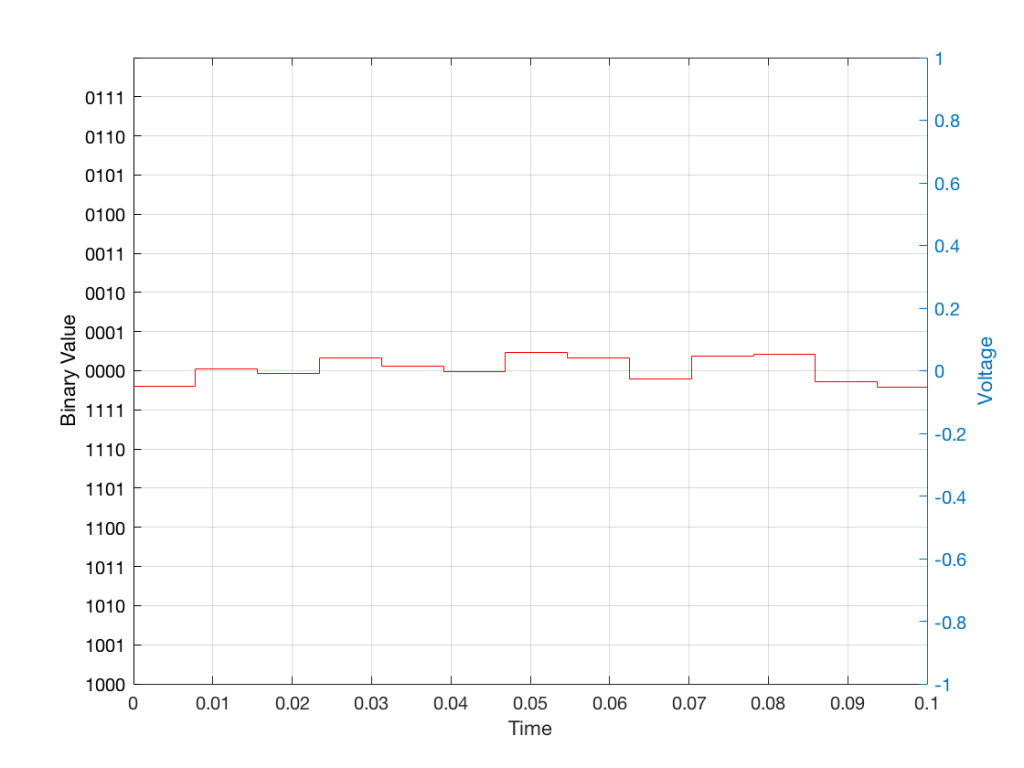
Just like the example of the ruler in Figure 8, above, we have a limited resolution in our measurement. For example, if we had only 4 bits to work with then the waveform in 4 – the one we have to measure – would be measured with the “ruler” shown on the left side of Figure 10, below.
Fig 10: The waveform from Figure 4 as a voltage (notice the Y-axis on the right). We have to measure these values using the ruler with the resolution shown on the Y-axis on the left.
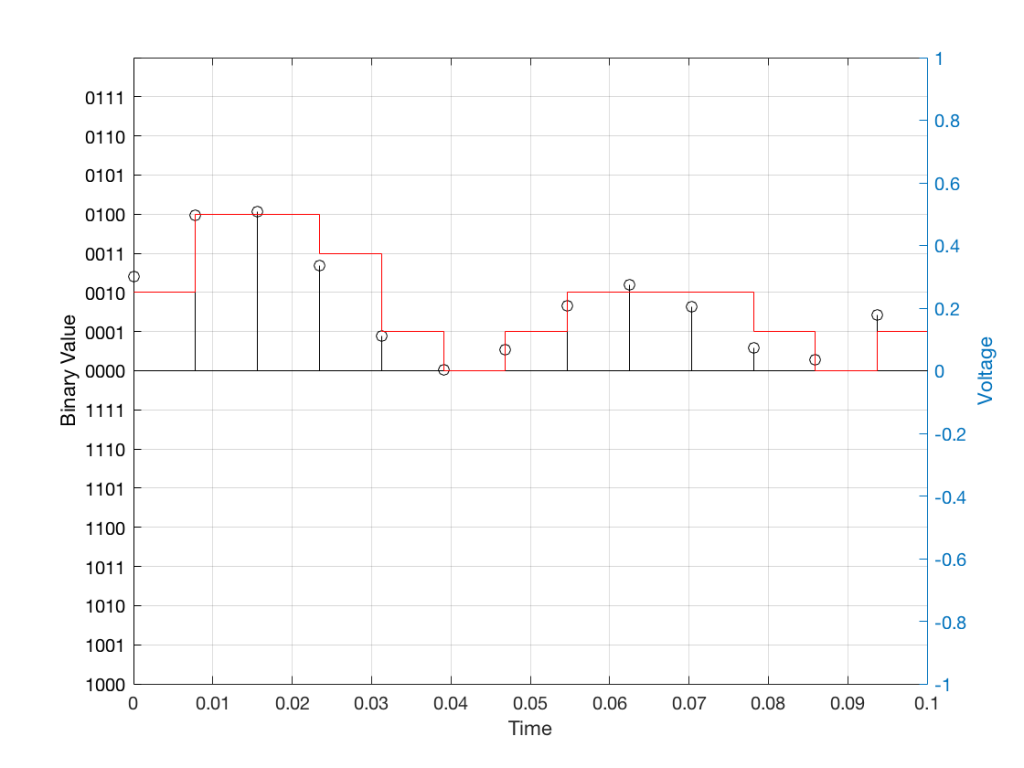
When we do this, we have to round off the value to the nearest “tick” on our ruler, as shown in Figure 11.
Fig 11: The values from figure 10 (shown as the circles) rounded off to the nearest value on our 4-bit ruler (the red staircase).
Using this “ruler” which gives a write-down-able “quantity” to the measurement, we get the following values for the red staircase:
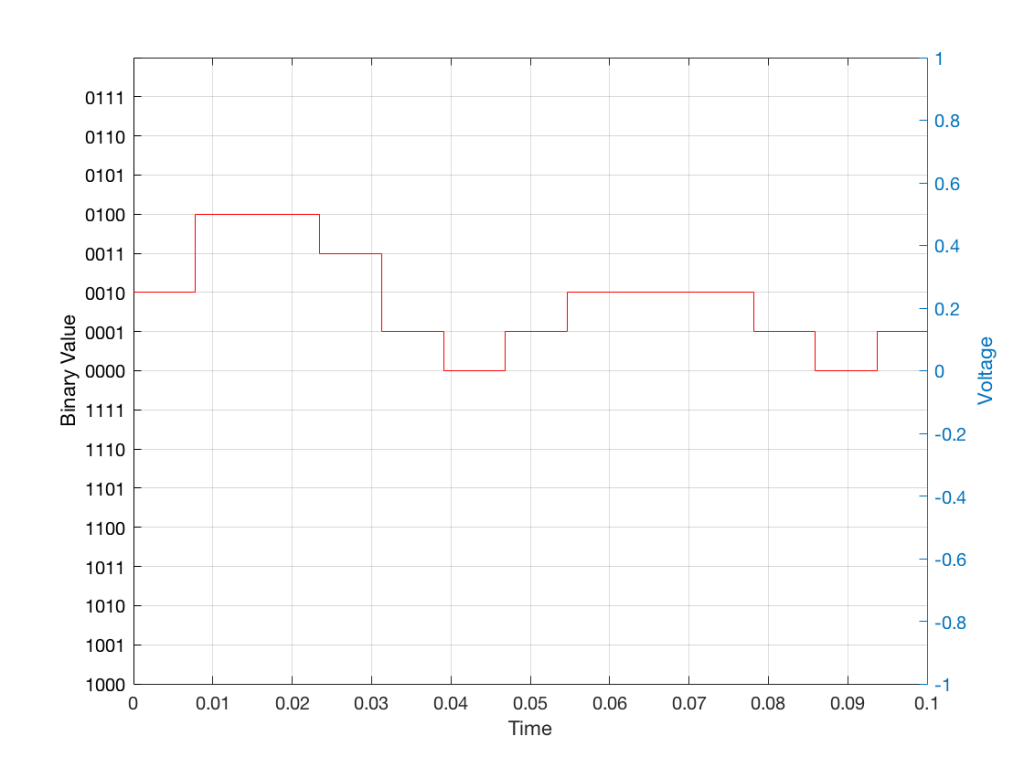
When we “play these back” we get the staircase again, shown in Figure 12.
Fig 12: The output of the measurements. Notice that all values sit exactly on one of the values for the “ruler” on the left Y-axis of the plot.
Of course, this means that, by rounding off the values, we have introduced an error in the system (just like the measurement in Figure 8 has a bigger error than the one in Figure 9). We can calculate this error if we just subtract the original signal from the output signal (in other words, Figure 12 minus Figure 10) to get Figure 13.
Fig 13: The error that we produced due to the rounding off of the signal when we did the measurements. Notice that the error is always less than 0.5 of a “tick” of the ruler on the left Y-axis.
In order to improve our accuracy of the measurement, we have to increase the precision of the values. We can do this by adding an extra digit (or bit) to the number that we use to record the value.
If we were using decimal numbers (0-9) then adding an extra digit to the number would give us 10 times as many possibilities. (For example, if we were using 4 digits after the decimal in the example at the start of this posting, we have a total of 10,000 possible values – 0.0000 to 0.9999. If we add one more digit, we increase the resolution to 100,000 possible values – 0.00000 to 0.99999 ).
In binary, adding one extra digit gives us twice as many “ticks” on the ruler. So, using 4 bits gives us 16 possible values. Increasing to 5 bits gives us 32 possible values.
If you’re listening to a CD, then the individual measurements of each voltage – the “sample values” – are stored with 16 bits, which means that we have 65,536 possible values to pick from.
Remember that this means that we have more “ticks” on our ruler – but we don’t necessarily increase its range. So, for example, we’re still measuring a voltage from -1 V to 1 V – we just have more and more resolution to do that measurement with.
Error #1
Finally! We get to the beginning of the point of the posting in the first place. My whole reason for starting this series of postings was to talk about errors in digital audio.
So, the first one to talk about is whether we have “bit matching” in a system where we expect to do so. For example, if you look at the S/P-DIF output of a good-old-fashioned CD player, do the sample values that are transmitted on that wire identical to the ones on the disc?
This is a fairly easy test to make (in theory). All you have to do is to record the digital signal on the S/P-DIF output of your CD player, subtract the original signal that’s on the disc (making sure that you have done your time alignment correctly). If you have anything other than nothing left over, then something went wrong somewhere.
If the result of this test is that you do NOT get nothing remaining, you cannot jump in head first and say that your S/P-DIF output is not working properly. For example, some sound cards have a sampling rate converter at their digital input. So, if you are capturing the CD player’s output using such a sound card on your computer, then perhaps the errors that you see are being produced by your sound card – and not your player.
A little associated story
This was a method that I used to do the final testing of Wireless Power Link for B&O. I created a little software application that made a signal and sent it out digitally to a Wireless Power Link transmitter (which was running with a resolution of 24 bits – giving us 16,777,216 possible values). I then connected a Wireless Power Link receiver’s output to the same computer. The computer knew how much time it took the signal to get from its output, through the wireless transmission system, back to its input (about 5 ms). So, I took the “output” signal, delayed it by that amount, and then subtracted it from the “input” signal. I then made a detector that counted every bit (instead of every sample) that was incorrect.
The reason I was counting bit errors instead of sample errors was that we wanted to be able to diagnose problems if we found them. If you find out that “this sample is wrong” – you don’t necessarily know whether it was one or more bit errors that caused the problem. By counting bit errors, you have a little more information that can help you diagnose the source of problems when you find them.
Sidebar: since this test was running at 48 kHz and 24 bits with a 2-channel system, that means that there were 2,304,000 bits per second being checked every second
This test ran 24-hours a day continuously for over 11 days. In that time, we found 0 bit errors. That means that we got 0 errors in more than 2,189,721,600,000 bits, which was good.
Now, just before anyone gets excited: that test was run to find out whether the WPL system was able to deliver a bit-perfect output in the absence of any external disturbances. So, the transmitter and the receiver were not moved at any time during the test, and nothing was moved between them – and the result was that the system behaved perfectly.
Almost all sound systems offer bass and treble adjustments for the sound – these are basically coarse versions of a more general tool called an equaliser that is often used in recording studios, and are increasingly found in high-end home audio equipment.
Once upon a time, if you made a long-distance phone call, there was an actual physical connection made between the wire running out of your telephone and the telephone at the other end of the line. This caused a big problem in signal quality because a lot of high-frequency components of the signal would get attenuated along the way due to losses in the wiring. Consequently, booster circuits were made to help make the relative levels of the various frequencies more equal. As a result, these circuits became known as equalisers. Nowadays, of course, we don’t need to use equalisers to fix the quality of long-distance phone calls (mostly because the communication paths use digital encoding instead of analogue transmission), but we do use them to customise the relative balance of various frequencies in an audio signal. This happens most often in a recording studio, but equalisers can be a great personalisation tool in a playback system in the home.
The two main reasons for using equalisation in a playback system are (1) personal preference and (2) compensation for the effects of the listening room’s acoustical behaviour.
Equalisers are typically comprised of a collection of filters, each of which has up to 4 “handles” or “parameters” that can be manipulated by the user. These parameters are
Filter Type
Gain
Centre Frequency
Q
Filter Type
The filter type will let you decide the relative levels of signals at frequencies within the band that you’re affecting.
There are up to 7 different types of filters that can be found in professional parametric equalisers. These are (in no particular order…)
Low Pass
High Pass
Low shelving
High shelving
Band-pass
Band-reject
Peaking (also known as Peak/Dip or Peak/Notch)
However, for this posting, we’ll just focus on the three most-used of these:
Low shelving
High shelving
Peaking
Low Shelving Filter
In theory, a low shelving filter affects gain of all frequencies below the stated frequency by the same amount. In reality, there is a band around the stated frequency where the filter transitions between a gain of 0 dB (no change in the signal) and the gain of the affected frequency band.
Figure 1: Example of a low shelving filter with a positive gain. Frequencies below approximately 80 Hz have been affected.
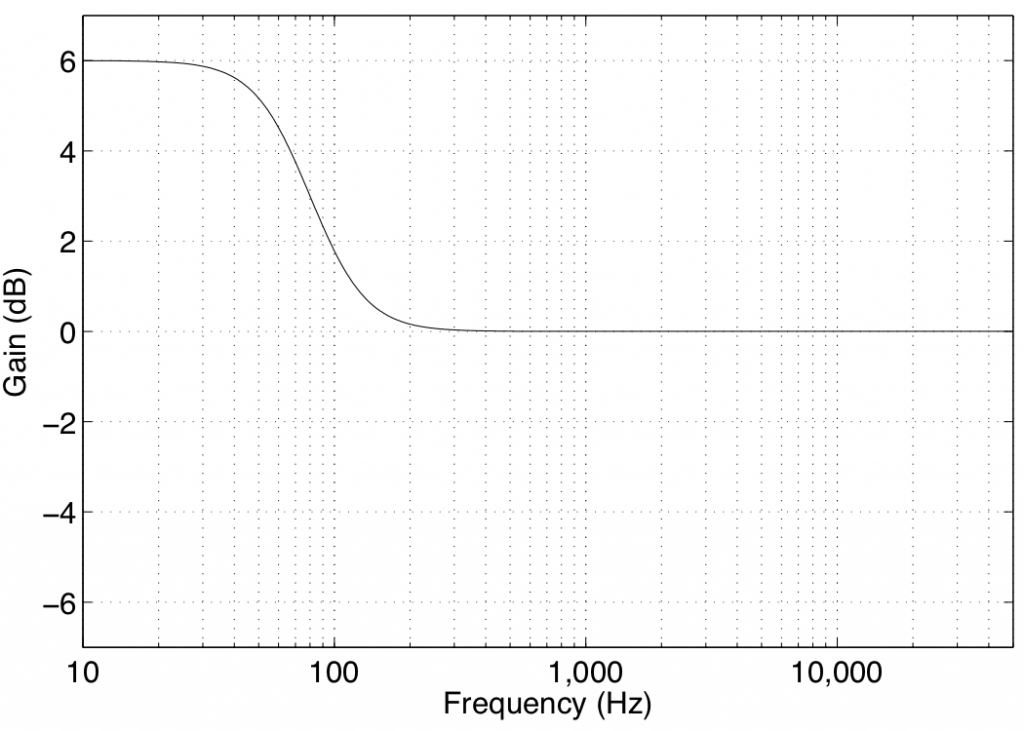
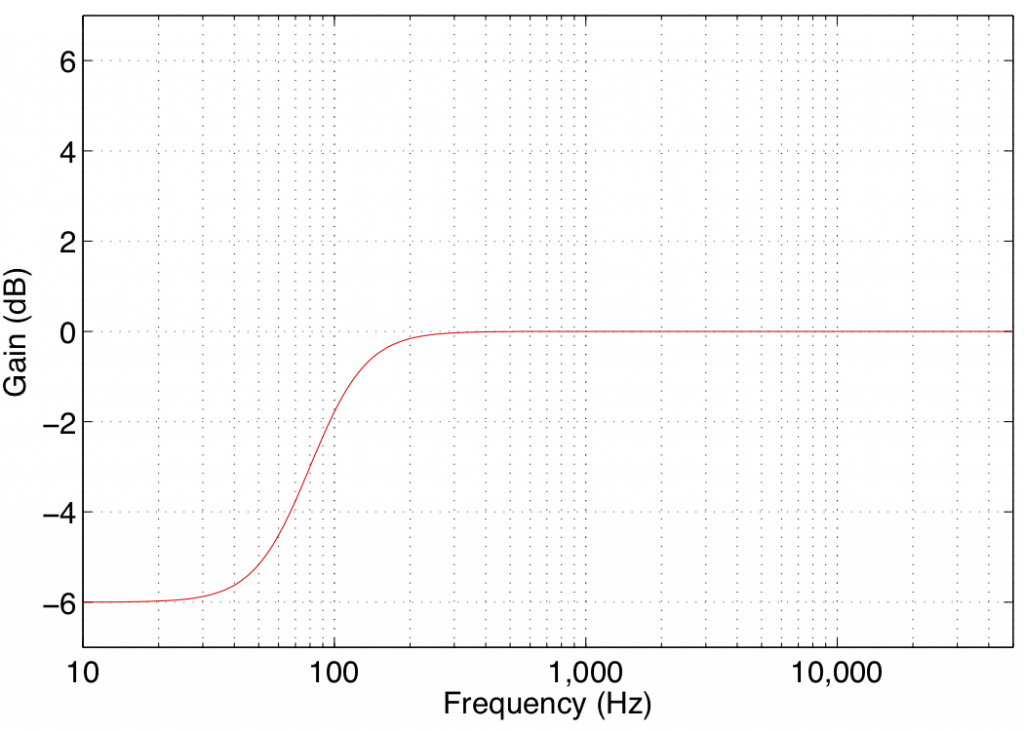
Figure 2: Example of a low shelving filter with a negative gain. Frequencies below approximately 80 Hz have been affected.
Note that the low shelving filters used in the parametric equalisers in Bang & Olufsen loudspeakers define the centre frequency as being the frequency where the gain is one half the maximum (or minimum) gain of the filter. For example, in Figure 1, the gain of the filter is 6 dB. The centre frequency is the frequency where the gain is one-half this value or 3 dB, which can be found at 80 Hz.
Some care should be taken when using low shelving filters since their affected frequency bands extend to 0 Hz or DC. This can cause a system to be pushed beyond its limits in extremely low frequency bands that are of little-to-no consequence to the audio signal. Note, however, that this is less of a concern for the B&O loudspeakers, since they are protected against such abuse.
High Shelving Filter
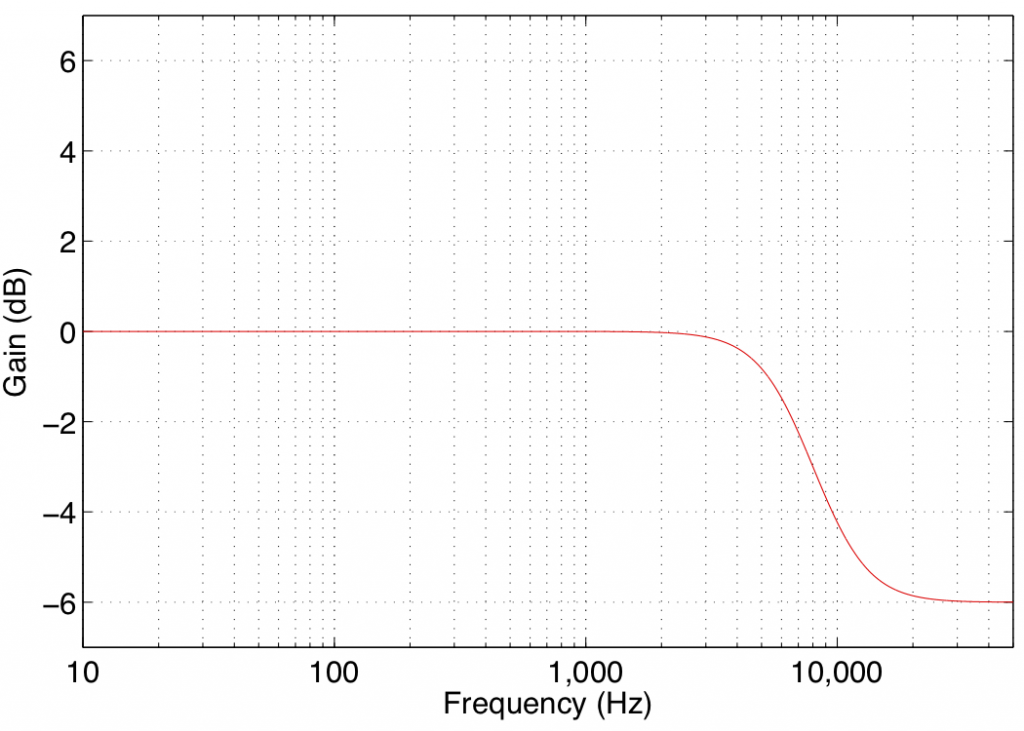
In theory, a high shelving filter affects gain of all frequencies above the stated frequency by the same amount. In reality, there is a band around the stated frequency where the filter transitions between a gain of 0 dB (where there is no change in the signal) and the gain of the affected frequency band.
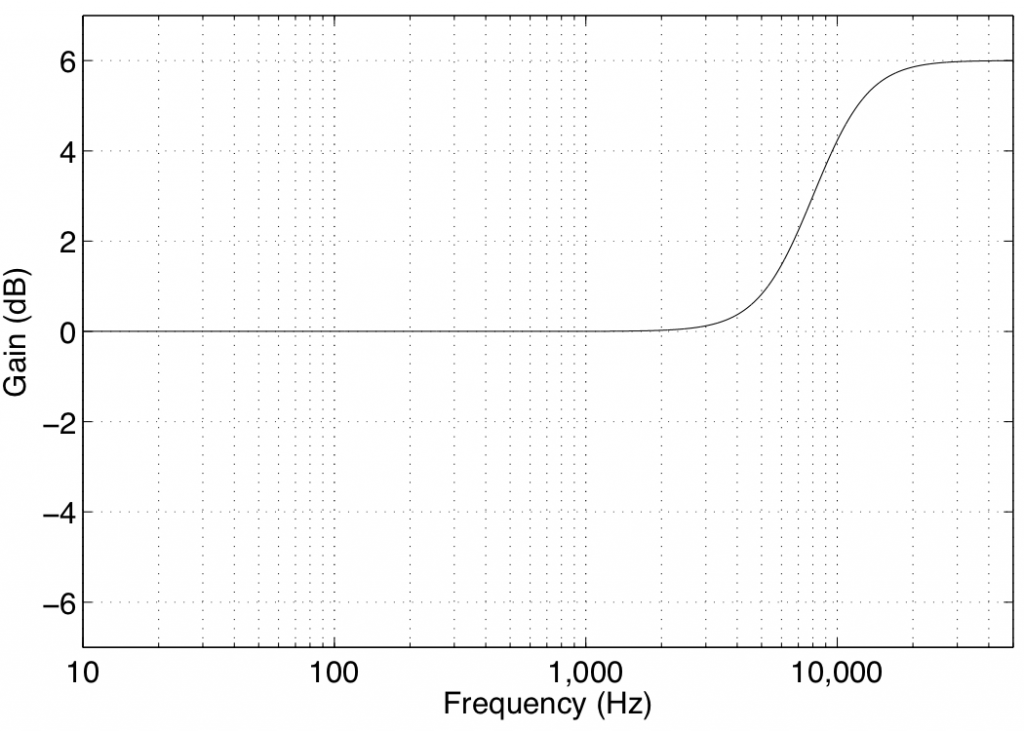
Figure 3: Example of a high shelving filter with a positive gain. Frequencies above approximately 8 kHz have been affected.
Figure 4: Example of a high shelving filter with a negative gain. Frequencies above approximately 8 kHz have been affected.
Note again that the high shelving filters used in B&O loudspeakers define the centre frequency as being the frequency where the gain is one half the maximum (or minimum) gain of the filter. For example, in Figure 4, the gain of the filter is -6 dB. The centre frequency is the frequency where the gain is one-half this value or -3 dB, which can be found at 8 kHz.
Some care should be taken when using high shelving filters since their affected frequency bands can extend beyond the audible frequency range. This can cause a system to be pushed beyond its limits in extremely high frequency bands that are of little-to-no consequence to the audio signal.
Peaking Filter
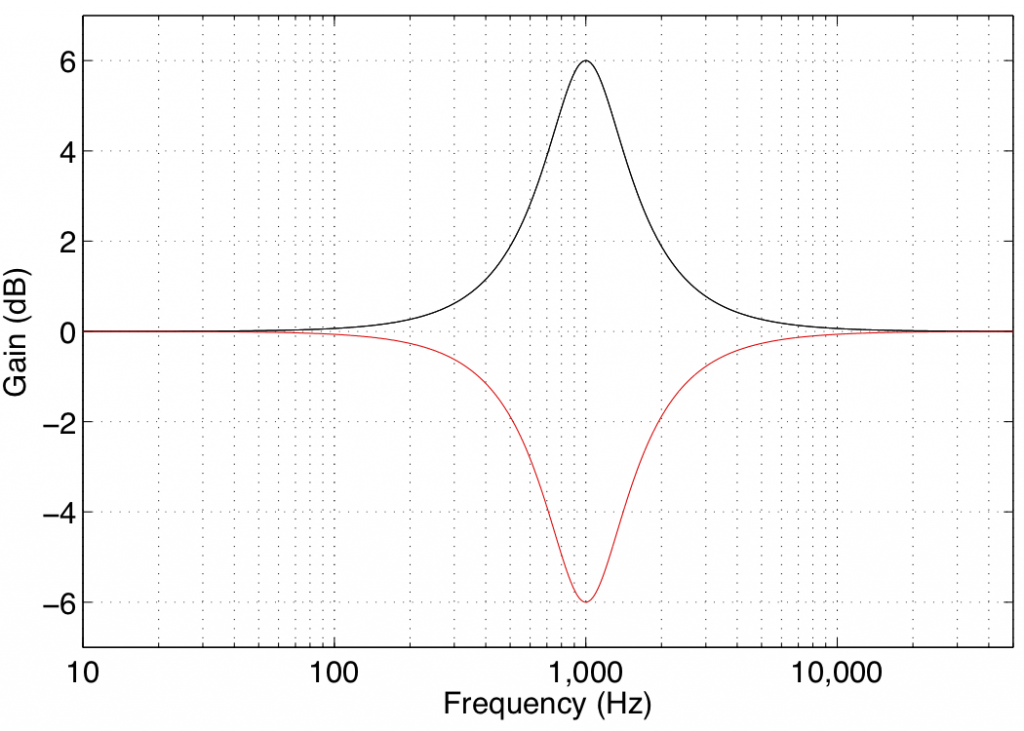
A peaking filter is used for a more local adjustment of a frequency band. In this case, the centre frequency of the filter is affected most (it will have the Gain of the filter applied to it) and adjacent frequencies on either side are affected less and less as you move further away. For example, Figure 5 shows the response of a peaking filter with a centre frequency of 1 kHz and gains of 6 dB (the black curve) and -6 dB (the red curve). As can be seen there, the maximum effect happens at 1 kHz and frequency bands to either side are affected less.
Figure 5: Example of two peaking filters. The black curve shows a filter with a positive gain, the red curve shows the reciprocal with a negative gain. The centre frequency of this filter is 1 kHz.
You may notice in Figure 5 that the black and red curves are symmetrical – in other words, they are identical except in polarity (in dB) of the gain. This is a particular type of peaking filter called a reciprocal peak/dip filter – so-called because these two filters, placed in series, can be used to cancel each other’s effects on the signal.
There are other types of peaking filters that are not reciprocal. This is true in cases where the Q is defined differently. However, we won’t get into that here. If you’d like to read about this “issue”, see this link.
Gain
If you need to make all frequencies in your audio signal louder, then you just need to increase the volume. However, if you want to be a little more selective and make some frequency bands louder (or quieter) and leave other bands unchanged, then you’ll need an equaliser. So, one of the important questions to ask is “how much louder?” or “how much quieter?” The answer to this question is the gain of the filter — this is the amount by which is signal is increased or decreased in level.
The gain of an equaliser filter is almost always given in decibels or dB. (The “B” is a capital because it’s named after Alexander Graham Bell.) This is a scale based on logarithmic changes in level. Luckily, it’s not necessary to understand logarithms in order to have an intuitive feel for decibels. There are really just three things to remember:
a gain of 0 dB is the same as saying “no change”
positive decibel values are louder, negative decibel values are quieter
adding approximately 6 dB to the gain is the same as saying “two times the level”. (Therefore, subtracting 6 dB is half the level.)
Centre Frequency
So, the next question to answer is “which frequency bands do you want to affect?” This is partially defined by the centre frequency or Fc of the filter. This is a value that is measured in the number of cycles per second (This is literally the number of times a loudspeaker driver will move in and out of the loudspeaker cabinet per second.), labelled Hertz or Hz.
Generally, if you want to increase (or reduce) the level of the bass, then you should set the centre frequency to a low value (roughly speaking, below 125 Hz). If you want to change the level of the high frequencies, then you should set the centre frequency to a high value (say, above 8 kHz).
Q
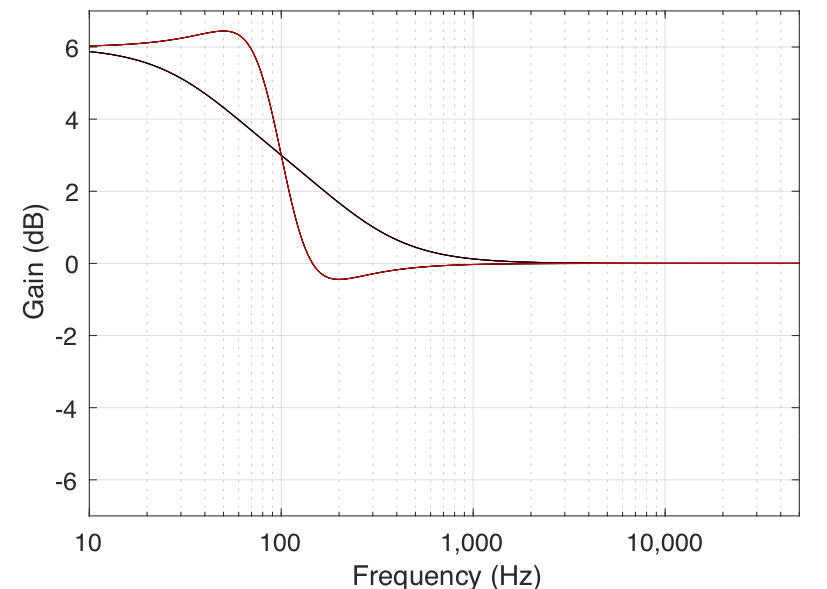
In all of the above filter types, there are transition bands — frequency areas where the filter’s gain is changing from 0 dB to the desired gain. Changing the filter’s Q allows you to alter the shape of this transition. The lower the Q, the smoother the transition. In both the case of the shelving filters and the peaking filter, this means that a wider band of frequencies will be affected. This can be seen in the examples in Figures 6 and 7.
Figure 6: Example of two low shelving filters. The black curve shows a filter with a Q of 0.4, the red curve shows the a filter with a Q of 1. For both filters, the centre frequency is 100 Hz and the gain is +6 dB.
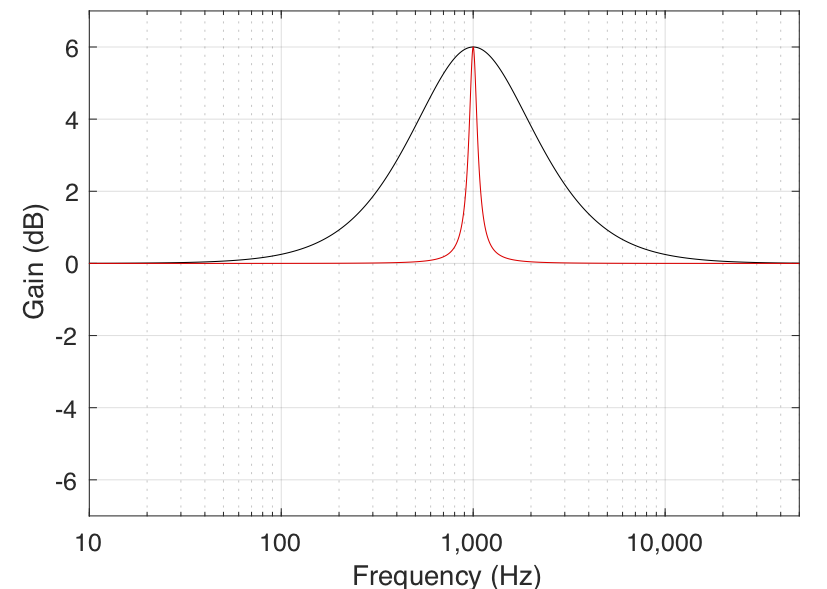
Figure 7: Example of two peaking filters. The black curve shows a filter with a Q of 0.5, the red curve shows the a filter with a Q of 8. For both filters, the centre frequency is 1 kHz and the gain is +6 dB.
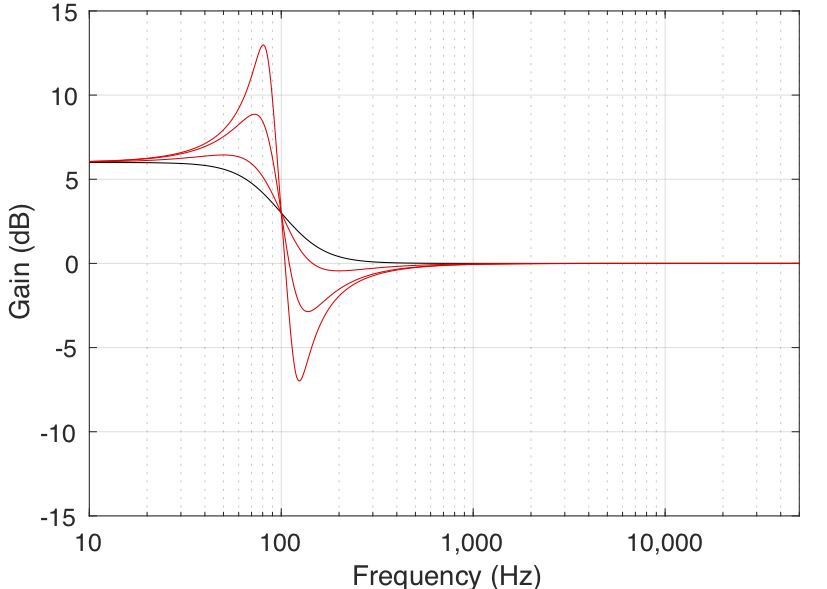
It should be explained that the Q parameter can cause a shelving filter to behave a little strangely. When the Q of a shelving filter exceeds a value of 0.707 (or 1/sqrt(2)), the gain of the filter will “overshoot” its limits. For example, as can be seen in Figure 8, a filter with a gain of 6 dB and a Q of 4 will actually have a gain of almost 13 dB and will attenuate by almost 7 dB.
Figure 8: Example of low-shelving filters with a Q of more than 0.707. The black curve shows a filter with a Q of 0.7 for reference, the red curves shows the a filter with Q’s of 1, 2, and 4.
Some extra information
Some people and books will say that “Q” stands for the “Quality” of the filter. This is a very old myth, but it is not true. There is a great paper worth reading called “The Story of Q” by Estill I. Green in which it is clearly stated “His [K.S. Johnson – an employee in the Engineering Dept. of the Western Electric Company, which later became Bell Telephone Laboratories.] reason for choosing Q was quite simple. He says that it did not stand for “quality factor” or anything else, but since the other letters of the alphabet had already been pre-empted for other purposes, Q was all he had left.”
For peaking filters, the Q of the filter is equal to the centre frequency divided by the filter’s bandwidth. So, if the Q of the filter is 2 and the centre frequency is 1 kHz, then the bandwidth will be 500 Hz. Another way to look at this is that, very roughly speaking, 1/Q will be the filter’s bandwidth in octaves. So, for example, a filter with a Q of 2 will have a bandwidth of about 1/2 an octave. A filter with a Q of 0.5 will have a bandwidth of about 2 octaves.
This is just a basic introduction to parametric equalisers. For more information, check out the explanation here.
I am not impressed! Apparently, Apple has decided that FTP shall no longer be available as a Unix command in the Terminal window as of 10.13.x (High Sierra)…
All I get is a message that says “ftp: command not found”. You have GOT to be kidding me…
Okay, okay, they’re not secrets… But it seems that, whenever I do one of these, and a “Mac person” is watching over my shoulder, they ask “how did you do that?”
I’m sure that there are Windows equivalents to all of these – but I’ve lived on a Mac for almost 30 years… Been a long time since I switched from an x86 machine to my brand-new Mac Classic!
Small steps in volume and brightness changes
Before pressing the “volume up” or “volume down” buttons, hold down OPTION+SHIFT. This will give you 4 times as many volume steps.
The same works for screen brightness and keyboard brightness.
Switching Safari tabs
Version 1: COMMAND + number will bring you directly to a tab.
Version 2: COMMAND+SHIFT + left/right arrow keys will move you left and right through your tabs. (Note that this one will not work with some webpages. For example, if you’re editing a WordPress posting, then this function is disabled on that tab.)
Note that, in the Finder, the second of these will work the same. The first will not – COMMAND+number in the Finder will change your view instead…
FIND in open Safari Tabs
Open up a bunch of different pages in different tabs in a Safari window
Show all tabs (under the VIEW menu)
Press COMMAND-F for find
Start typing a word – Safari will automatically start showing only the tabs that contain the search word